
 di0ib
7 years ago
di0ib
7 years ago
16 changed files with 1064 additions and 1 deletions
BIN
keyboard/flanck/FLASH.bin
View File
+ 1
- 1
keyboard/flanck/config.h
View File
| #define ws2812_PORTREG PORTD | #define ws2812_PORTREG PORTD | ||||
| #define ws2812_DDRREG DDRD | #define ws2812_DDRREG DDRD | ||||
| #define ws2812_pin PD2 | #define ws2812_pin PD2 | ||||
| #define RGBLED_NUM 10 // Number of LEDs | |||||
| #define RGBLED_NUM 4 // Number of LEDs | |||||
| #ifndef RGBLIGHT_HUE_STEP | #ifndef RGBLIGHT_HUE_STEP | ||||
| #define RGBLIGHT_HUE_STEP 10 | #define RGBLIGHT_HUE_STEP 10 | ||||
| #endif | #endif |
BIN
keyboard/flanck/flanck.bin
View File
BIN
keyboard/gnap/FLASH.bin
View File
BIN
keyboard/gnap/gnap.bin
View File
BIN
keyboard/kwark/FLASH.bin
View File
+ 426
- 0
keyboard/kwark/LED_FastGPIO.ino
View File
| #include <FastGPIO.h> | |||||
| #include <TimerOne.h> | |||||
| int iByte; | |||||
| byte col = 0; | |||||
| byte leds[12][4]; | |||||
| byte pass = 1; | |||||
| int fadecount = 1; | |||||
| const int fadelimit = 3000; | |||||
| const int fadelimitshort = 1000; | |||||
| byte mode = 4; | |||||
| byte brightness = 2; | |||||
| boolean changemode = 0; | |||||
| int rain = 0; | |||||
| const int rainlimit = 5000; | |||||
| const int rainfade = 5000; | |||||
| byte rx = 0; | |||||
| byte ry = 0; | |||||
| // pin[xx] on led matrix connected to nn on Arduino (-1 is dummy to make array start at pos 1) | |||||
| int pins[17] = { | |||||
| -1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 16, 14, 15, 18, 19, 20, 21 | |||||
| }; | |||||
| // col[xx] of leds = pin yy on led matrix | |||||
| int cols[12] = { | |||||
| pins[8], pins[7], pins[6], pins[5], pins[9], pins[10], pins[11], pins[12], pins[13], pins[14], pins[15], pins[16] | |||||
| }; | |||||
| // row[xx] of leds = pin yy on led matrix | |||||
| int rows[4] = { | |||||
| pins[1], pins[2], pins[3], pins[4] | |||||
| }; | |||||
| #define DELAY 0 | |||||
| extern byte leds[12][4]; | |||||
| void setup() { | |||||
| Serial1.begin(9600); | |||||
| setupLeds(); | |||||
| for (int s = 0; s < 5; s++) { | |||||
| for ( int r = 1; r < 9; r++) { | |||||
| delayMicroseconds(65000); | |||||
| delayMicroseconds(65000); | |||||
| for (int j = 0; j < 4; j++) { | |||||
| for (int i = 0; i < 12; i++) { | |||||
| leds[i][j] = 1; | |||||
| for (int p = 0; p < 25; p++) { | |||||
| } | |||||
| leds[i][j] = r; | |||||
| } | |||||
| } | |||||
| } | |||||
| for ( int r = 9; r > 0; r--) { | |||||
| delayMicroseconds(65000); | |||||
| delayMicroseconds(65000); | |||||
| delayMicroseconds(65000); | |||||
| for (int j = 0; j < 4; j++) { | |||||
| for (int i = 0; i < 12; i++) { | |||||
| leds[i][j] = 1; | |||||
| for (int p = 0; p < 25; p++) { | |||||
| } | |||||
| leds[i][j] = r; | |||||
| } | |||||
| } | |||||
| } | |||||
| } | |||||
| } | |||||
| void loop() { | |||||
| switch (mode) { | |||||
| case 0: | |||||
| //Blacklight | |||||
| for (int i = 0; i < 12; i++) { | |||||
| for (int j = 0; j < 4; j++) { | |||||
| leds[i][j] = brightness; | |||||
| } | |||||
| } | |||||
| checkserial(); | |||||
| break; | |||||
| case 1: | |||||
| //Breathing | |||||
| for ( int r = 1; r < 9; r++) { | |||||
| checkserial(); | |||||
| if (changemode == 0) { | |||||
| delayMicroseconds(65000); | |||||
| delayMicroseconds(65000); | |||||
| delayMicroseconds(65000); | |||||
| for (int j = 0; j < 4; j++) { | |||||
| for (int i = 0; i < 12; i++) { | |||||
| leds[i][j] = 1; | |||||
| for (int p = 0; p < 25; p++) { | |||||
| } | |||||
| leds[i][j] = r; | |||||
| } | |||||
| } | |||||
| } | |||||
| else { | |||||
| break; | |||||
| } | |||||
| } | |||||
| for ( int r = 9; r > 0; r--) { | |||||
| checkserial(); | |||||
| if (changemode == 0) { | |||||
| delayMicroseconds(65000); | |||||
| delayMicroseconds(65000); | |||||
| delayMicroseconds(65000); | |||||
| delayMicroseconds(65000); | |||||
| for (int j = 0; j < 4; j++) { | |||||
| for (int i = 0; i < 12; i++) { | |||||
| leds[i][j] = 1; | |||||
| for (int p = 0; p < 25; p++) { | |||||
| } | |||||
| leds[i][j] = r; | |||||
| } | |||||
| } | |||||
| } | |||||
| else { | |||||
| break; | |||||
| } | |||||
| } | |||||
| for ( int r = 1; r < 30; r++) { | |||||
| checkserial(); | |||||
| if (changemode == 0) { | |||||
| delayMicroseconds(65000); | |||||
| delayMicroseconds(65000); | |||||
| } | |||||
| else { | |||||
| break; | |||||
| } | |||||
| } | |||||
| break; | |||||
| case 2: | |||||
| //Random | |||||
| leds[random(12)][random(4)] = random(8); | |||||
| delayMicroseconds(10000); | |||||
| checkserial(); | |||||
| break; | |||||
| case 3: | |||||
| //Rain | |||||
| rain++; | |||||
| if (rain > rainlimit) { | |||||
| rain = 0; | |||||
| rx = random(12); | |||||
| ry = random(4); | |||||
| if (leds[rx][ry] == 0) { | |||||
| leds[rx][ry] = 18; | |||||
| } | |||||
| } | |||||
| fadecount++; | |||||
| if (fadecount > rainfade) { | |||||
| fadecount = 1; | |||||
| for (int i = 0; i < 12; i++) { | |||||
| for (int j = 0; j < 4; j++) { | |||||
| if (leds[i][j] > 0) { | |||||
| leds[i][j] = leds[i][j] - 1; | |||||
| } | |||||
| } | |||||
| } | |||||
| } | |||||
| checkserial(); | |||||
| break; | |||||
| case 4: | |||||
| //Reactive | |||||
| fadecount++; | |||||
| if (fadecount > fadelimit) { | |||||
| fadecount = 1; | |||||
| for (int i = 0; i < 12; i++) { | |||||
| for (int j = 0; j < 4; j++) { | |||||
| if (leds[i][j] > 0) { | |||||
| leds[i][j] = leds[i][j] - 1; | |||||
| } | |||||
| } | |||||
| } | |||||
| } | |||||
| checkserial(); | |||||
| break; | |||||
| case 5: | |||||
| //Reactive Target | |||||
| fadecount++; | |||||
| if (fadecount > fadelimitshort) { | |||||
| fadecount = 1; | |||||
| for (int i = 0; i < 12; i++) { | |||||
| for (int j = 0; j < 4; j++) { | |||||
| if (leds[i][j] > 0) { | |||||
| leds[i][j] = leds[i][j] - 1; | |||||
| } | |||||
| } | |||||
| } | |||||
| } | |||||
| checkserial(); | |||||
| break; | |||||
| default: | |||||
| mode = 0; | |||||
| break; | |||||
| } | |||||
| changemode = 0; | |||||
| } | |||||
| void checkserial() { | |||||
| if (Serial1.available() > 0) { | |||||
| iByte = Serial1.read(); | |||||
| if (iByte == 100) { | |||||
| brightness++; | |||||
| if (brightness > 9) { | |||||
| brightness = 1; | |||||
| } | |||||
| } | |||||
| if (iByte == 101) { | |||||
| mode++; | |||||
| } | |||||
| if (iByte < 100) { | |||||
| if (mode == 4) { | |||||
| byte row = iByte / 16; | |||||
| byte col = iByte % 16; | |||||
| leds[col][row] = 18; | |||||
| } | |||||
| if (mode == 5) { | |||||
| byte row = iByte / 16; | |||||
| byte col = iByte % 16; | |||||
| for (byte i = 0; i < 12; i++) { | |||||
| leds[i][row] = 18; | |||||
| } | |||||
| for (byte p = 0; p < 4; p++) { | |||||
| leds[col][p] = 18; | |||||
| } | |||||
| } | |||||
| } | |||||
| } | |||||
| } | |||||
| void setupLeds() { | |||||
| // sets the pins as output | |||||
| FastGPIO::Pin<2>::setOutputLow(); | |||||
| FastGPIO::Pin<3>::setOutputLow(); | |||||
| FastGPIO::Pin<4>::setOutputLow(); | |||||
| FastGPIO::Pin<5>::setOutputLow(); | |||||
| FastGPIO::Pin<6>::setOutputLow(); | |||||
| FastGPIO::Pin<7>::setOutputLow(); | |||||
| FastGPIO::Pin<8>::setOutputLow(); | |||||
| FastGPIO::Pin<9>::setOutputLow(); | |||||
| FastGPIO::Pin<10>::setOutputLow(); | |||||
| FastGPIO::Pin<16>::setOutputLow(); | |||||
| FastGPIO::Pin<14>::setOutputLow(); | |||||
| FastGPIO::Pin<15>::setOutputLow(); | |||||
| FastGPIO::Pin<18>::setOutputLow(); | |||||
| FastGPIO::Pin<19>::setOutputLow(); | |||||
| FastGPIO::Pin<20>::setOutputLow(); | |||||
| FastGPIO::Pin<21>::setOutputLow(); | |||||
| // set up Cols | |||||
| FastGPIO::Pin<6>::setOutputValueLow(); | |||||
| FastGPIO::Pin<7>::setOutputValueLow(); | |||||
| FastGPIO::Pin<8>::setOutputValueLow(); | |||||
| FastGPIO::Pin<9>::setOutputValueLow(); | |||||
| FastGPIO::Pin<10>::setOutputValueLow(); | |||||
| FastGPIO::Pin<16>::setOutputValueLow(); | |||||
| FastGPIO::Pin<14>::setOutputValueLow(); | |||||
| FastGPIO::Pin<15>::setOutputValueLow(); | |||||
| FastGPIO::Pin<18>::setOutputValueLow(); | |||||
| FastGPIO::Pin<19>::setOutputValueLow(); | |||||
| FastGPIO::Pin<20>::setOutputValueLow(); | |||||
| FastGPIO::Pin<21>::setOutputValueLow(); | |||||
| // set up Rows | |||||
| FastGPIO::Pin<2>::setOutputValueLow(); | |||||
| FastGPIO::Pin<3>::setOutputValueLow(); | |||||
| FastGPIO::Pin<4>::setOutputValueLow(); | |||||
| FastGPIO::Pin<5>::setOutputValueLow(); | |||||
| clearLeds(); | |||||
| Timer1.initialize(25); | |||||
| Timer1.attachInterrupt(display); | |||||
| } | |||||
| void clearLeds() { | |||||
| // Clear display array | |||||
| for (int i = 0; i < 12; i++) { | |||||
| for (int j = 0; j < 4; j++) { | |||||
| leds[i][j] = 0; | |||||
| } | |||||
| } | |||||
| } | |||||
| void onLeds() { | |||||
| // Clear display array | |||||
| for (int i = 0; i < 12; i++) { | |||||
| for (int j = 0; j < 4; j++) { | |||||
| leds[i][j] = 7; | |||||
| } | |||||
| } | |||||
| } | |||||
| // Interrupt routine | |||||
| void display() { | |||||
| switch (col) { // Turn whole previous column off | |||||
| case 0: | |||||
| FastGPIO::Pin<6>::setOutputValueLow(); | |||||
| break; | |||||
| case 1: | |||||
| FastGPIO::Pin<7>::setOutputValueLow(); | |||||
| break; | |||||
| case 2: | |||||
| FastGPIO::Pin<8>::setOutputValueLow(); | |||||
| break; | |||||
| case 3: | |||||
| FastGPIO::Pin<9>::setOutputValueLow(); | |||||
| break; | |||||
| case 4: | |||||
| FastGPIO::Pin<10>::setOutputValueLow(); | |||||
| break; | |||||
| case 5: | |||||
| FastGPIO::Pin<16>::setOutputValueLow(); | |||||
| break; | |||||
| case 6: | |||||
| FastGPIO::Pin<14>::setOutputValueLow(); | |||||
| break; | |||||
| case 7: | |||||
| FastGPIO::Pin<15>::setOutputValueLow(); | |||||
| break; | |||||
| case 8: | |||||
| FastGPIO::Pin<18>::setOutputValueLow(); | |||||
| break; | |||||
| case 9: | |||||
| FastGPIO::Pin<19>::setOutputValueLow(); | |||||
| break; | |||||
| case 10: | |||||
| FastGPIO::Pin<20>::setOutputValueLow(); | |||||
| break; | |||||
| case 11: | |||||
| FastGPIO::Pin<21>::setOutputValueLow(); | |||||
| break; | |||||
| } | |||||
| col++; | |||||
| if (col == 12) { | |||||
| col = 0; | |||||
| pass++; | |||||
| if (pass > 8) { | |||||
| pass = 1; | |||||
| } | |||||
| } | |||||
| for (int row = 0; row < 4; row++) { | |||||
| if (leds[col][row] > pass) { | |||||
| switch (row) { // Turn on this led | |||||
| case 0: | |||||
| FastGPIO::Pin<2>::setOutputValueLow(); | |||||
| break; | |||||
| case 1: | |||||
| FastGPIO::Pin<3>::setOutputValueLow(); | |||||
| break; | |||||
| case 2: | |||||
| FastGPIO::Pin<4>::setOutputValueLow(); | |||||
| break; | |||||
| case 3: | |||||
| FastGPIO::Pin<5>::setOutputValueLow(); | |||||
| break; | |||||
| } | |||||
| } | |||||
| else { | |||||
| switch (row) { // Turn off this led | |||||
| case 0: | |||||
| FastGPIO::Pin<2>::setOutputValueHigh(); | |||||
| break; | |||||
| case 1: | |||||
| FastGPIO::Pin<3>::setOutputValueHigh(); | |||||
| break; | |||||
| case 2: | |||||
| FastGPIO::Pin<4>::setOutputValueHigh(); | |||||
| break; | |||||
| case 3: | |||||
| FastGPIO::Pin<5>::setOutputValueHigh(); | |||||
| break; | |||||
| } | |||||
| } | |||||
| } | |||||
| switch (col) { // Turn column on | |||||
| case 0: | |||||
| FastGPIO::Pin<6>::setOutputValueHigh(); | |||||
| break; | |||||
| case 1: | |||||
| FastGPIO::Pin<7>::setOutputValueHigh(); | |||||
| break; | |||||
| case 2: | |||||
| FastGPIO::Pin<8>::setOutputValueHigh(); | |||||
| break; | |||||
| case 3: | |||||
| FastGPIO::Pin<9>::setOutputValueHigh(); | |||||
| break; | |||||
| case 4: | |||||
| FastGPIO::Pin<10>::setOutputValueHigh(); | |||||
| break; | |||||
| case 5: | |||||
| FastGPIO::Pin<16>::setOutputValueHigh(); | |||||
| break; | |||||
| case 6: | |||||
| FastGPIO::Pin<14>::setOutputValueHigh(); | |||||
| break; | |||||
| case 7: | |||||
| FastGPIO::Pin<15>::setOutputValueHigh(); | |||||
| break; | |||||
| case 8: | |||||
| FastGPIO::Pin<18>::setOutputValueHigh(); | |||||
| break; | |||||
| case 9: | |||||
| FastGPIO::Pin<19>::setOutputValueHigh(); | |||||
| break; | |||||
| case 10: | |||||
| FastGPIO::Pin<20>::setOutputValueHigh(); | |||||
| break; | |||||
| case 11: | |||||
| FastGPIO::Pin<21>::setOutputValueHigh(); | |||||
| break; | |||||
| } | |||||
| } | |||||
+ 135
- 0
keyboard/kwark/Makefile
View File
| #---------------------------------------------------------------------------- | |||||
| # On command line: | |||||
| # | |||||
| # make all = Make software. | |||||
| # | |||||
| # make clean = Clean out built project files. | |||||
| # | |||||
| # make coff = Convert ELF to AVR COFF. | |||||
| # | |||||
| # make extcoff = Convert ELF to AVR Extended COFF. | |||||
| # | |||||
| # make program = Download the hex file to the device. | |||||
| # Please customize your programmer settings(PROGRAM_CMD) | |||||
| # | |||||
| # make teensy = Download the hex file to the device, using teensy_loader_cli. | |||||
| # (must have teensy_loader_cli installed). | |||||
| # | |||||
| # make dfu = Download the hex file to the device, using dfu-programmer (must | |||||
| # have dfu-programmer installed). | |||||
| # | |||||
| # make flip = Download the hex file to the device, using Atmel FLIP (must | |||||
| # have Atmel FLIP installed). | |||||
| # | |||||
| # make dfu-ee = Download the eeprom file to the device, using dfu-programmer | |||||
| # (must have dfu-programmer installed). | |||||
| # | |||||
| # make flip-ee = Download the eeprom file to the device, using Atmel FLIP | |||||
| # (must have Atmel FLIP installed). | |||||
| # | |||||
| # make debug = Start either simulavr or avarice as specified for debugging, | |||||
| # with avr-gdb or avr-insight as the front end for debugging. | |||||
| # | |||||
| # make filename.s = Just compile filename.c into the assembler code only. | |||||
| # | |||||
| # make filename.i = Create a preprocessed source file for use in submitting | |||||
| # bug reports to the GCC project. | |||||
| # | |||||
| # To rebuild project do "make clean" then "make all". | |||||
| #---------------------------------------------------------------------------- | |||||
| # Target file name (without extension). | |||||
| TARGET = kwark | |||||
| # Directory common source filess exist | |||||
| TMK_DIR = ../../tmk_core | |||||
| # Directory keyboard dependent files exist | |||||
| TARGET_DIR = . | |||||
| # project specific files | |||||
| SRC = matrix.c \ | |||||
| led.c \ | |||||
| protocol/serial_uart.c | |||||
| ifdef KEYMAP | |||||
| SRC := keymap_$(KEYMAP).c $(SRC) | |||||
| else | |||||
| SRC := keymap_kwark.c $(SRC) | |||||
| endif | |||||
| CONFIG_H = config.h | |||||
| # MCU name | |||||
| #MCU = at90usb1287 | |||||
| MCU = atmega32u4 | |||||
| # Processor frequency. | |||||
| # This will define a symbol, F_CPU, in all source code files equal to the | |||||
| # processor frequency in Hz. You can then use this symbol in your source code to | |||||
| # calculate timings. Do NOT tack on a 'UL' at the end, this will be done | |||||
| # automatically to create a 32-bit value in your source code. | |||||
| # | |||||
| # This will be an integer division of F_USB below, as it is sourced by | |||||
| # F_USB after it has run through any CPU prescalers. Note that this value | |||||
| # does not *change* the processor frequency - it should merely be updated to | |||||
| # reflect the processor speed set externally so that the code can use accurate | |||||
| # software delays. | |||||
| F_CPU = 16000000 | |||||
| # | |||||
| # LUFA specific | |||||
| # | |||||
| # Target architecture (see library "Board Types" documentation). | |||||
| ARCH = AVR8 | |||||
| # Input clock frequency. | |||||
| # This will define a symbol, F_USB, in all source code files equal to the | |||||
| # input clock frequency (before any prescaling is performed) in Hz. This value may | |||||
| # differ from F_CPU if prescaling is used on the latter, and is required as the | |||||
| # raw input clock is fed directly to the PLL sections of the AVR for high speed | |||||
| # clock generation for the USB and other AVR subsections. Do NOT tack on a 'UL' | |||||
| # at the end, this will be done automatically to create a 32-bit value in your | |||||
| # source code. | |||||
| # | |||||
| # If no clock division is performed on the input clock inside the AVR (via the | |||||
| # CPU clock adjust registers or the clock division fuses), this will be equal to F_CPU. | |||||
| F_USB = $(F_CPU) | |||||
| # Interrupt driven control endpoint task(+60) | |||||
| OPT_DEFS += -DINTERRUPT_CONTROL_ENDPOINT | |||||
| # Boot Section Size in *bytes* | |||||
| # Teensy halfKay 512 | |||||
| # Teensy++ halfKay 1024 | |||||
| # Atmel DFU loader 4096 | |||||
| # LUFA bootloader 4096 | |||||
| # USBaspLoader 2048 | |||||
| OPT_DEFS += -DBOOTLOADER_SIZE=4096 | |||||
| # Build Options | |||||
| # comment out to disable the options. | |||||
| # | |||||
| BOOTMAGIC_ENABLE = yes # Virtual DIP switch configuration(+1000) | |||||
| MOUSEKEY_ENABLE = yes # Mouse keys(+4700) | |||||
| EXTRAKEY_ENABLE = yes # Audio control and System control(+450) | |||||
| CONSOLE_ENABLE = yes # Console for debug(+400) | |||||
| COMMAND_ENABLE = yes # Commands for debug and configuration | |||||
| #SLEEP_LED_ENABLE = yes # Breathing sleep LED during USB suspend | |||||
| NKRO_ENABLE = yes # USB Nkey Rollover - not yet supported in LUFA | |||||
| # Optimize size but this may cause error "relocation truncated to fit" | |||||
| #EXTRALDFLAGS = -Wl,--relax | |||||
| # Search Path | |||||
| VPATH += $(TARGET_DIR) | |||||
| VPATH += $(TMK_DIR) | |||||
| include $(TMK_DIR)/protocol/lufa.mk | |||||
| include $(TMK_DIR)/common.mk | |||||
| include $(TMK_DIR)/rules.mk |
+ 93
- 0
keyboard/kwark/config.h
View File
| /* | |||||
| Copyright 2012 Jun Wako <[email protected]> | |||||
| This program is free software: you can redistribute it and/or modify | |||||
| it under the terms of the GNU General Public License as published by | |||||
| the Free Software Foundation, either version 2 of the License, or | |||||
| (at your option) any later version. | |||||
| This program is distributed in the hope that it will be useful, | |||||
| but WITHOUT ANY WARRANTY; without even the implied warranty of | |||||
| MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the | |||||
| GNU General Public License for more details. | |||||
| You should have received a copy of the GNU General Public License | |||||
| along with this program. If not, see <http://www.gnu.org/licenses/>. | |||||
| */ | |||||
| #ifndef CONFIG_H | |||||
| #define CONFIG_H | |||||
| /* USB Device descriptor parameter */ | |||||
| #define VENDOR_ID 0xFEED | |||||
| #define PRODUCT_ID 0x0A0C | |||||
| #define DEVICE_VER 0x000A | |||||
| #define MANUFACTURER di0ib | |||||
| #define PRODUCT The KWARK Keyboard | |||||
| #define DESCRIPTION A compact keyboard | |||||
| /* key matrix size */ | |||||
| #define MATRIX_ROWS 4 | |||||
| #define MATRIX_COLS 12 | |||||
| /* define if matrix has ghost */ | |||||
| //#define MATRIX_HAS_GHOST | |||||
| /* Set 0 if debouncing isn't needed */ | |||||
| #define DEBOUNCE 5 | |||||
| /* Mechanical locking support. Use KC_LCAP, KC_LNUM or KC_LSCR instead in keymap */ | |||||
| #define LOCKING_SUPPORT_ENABLE | |||||
| /* Locking resynchronize hack */ | |||||
| #define LOCKING_RESYNC_ENABLE | |||||
| /* key combination for command */ | |||||
| #define IS_COMMAND() ( \ | |||||
| keyboard_report->mods == (MOD_BIT(KC_LSHIFT) | MOD_BIT(KC_RSHIFT)) \ | |||||
| ) | |||||
| /* Enable GNAP matrix serial output */ | |||||
| #define GNAP_ENABLE | |||||
| /* USART configuration */ | |||||
| #ifdef __AVR_ATmega32U4__ | |||||
| # define SERIAL_UART_BAUD 9600 | |||||
| # define SERIAL_UART_DATA UDR1 | |||||
| # define SERIAL_UART_UBRR (F_CPU / (16UL * SERIAL_UART_BAUD) - 1) | |||||
| # define SERIAL_UART_RXD_VECT USART1_RX_vect | |||||
| # define SERIAL_UART_TXD_READY (UCSR1A & _BV(UDRE1)) | |||||
| # define SERIAL_UART_INIT() do { \ | |||||
| /* baud rate */ \ | |||||
| UBRR1L = SERIAL_UART_UBRR; \ | |||||
| /* baud rate */ \ | |||||
| UBRR1H = SERIAL_UART_UBRR >> 8; \ | |||||
| /* enable TX */ \ | |||||
| UCSR1B = _BV(TXEN1); \ | |||||
| /* 8-bit data */ \ | |||||
| UCSR1C = _BV(UCSZ11) | _BV(UCSZ10); \ | |||||
| sei(); \ | |||||
| } while(0) | |||||
| # else | |||||
| # error "USART configuration is needed." | |||||
| #endif | |||||
| /* | |||||
| * Feature disable options | |||||
| * These options are also useful to firmware size reduction. | |||||
| */ | |||||
| /* disable debug print */ | |||||
| //#define NO_DEBUG | |||||
| /* disable print */ | |||||
| //#define NO_PRINT | |||||
| /* disable action features */ | |||||
| //#define NO_ACTION_LAYER | |||||
| //#define NO_ACTION_TAPPING | |||||
| //#define NO_ACTION_ONESHOT | |||||
| //#define NO_ACTION_MACRO | |||||
| //#define NO_ACTION_FUNCTION | |||||
| #endif |
+ 49
- 0
keyboard/kwark/keymap_common.h
View File
| /* | |||||
| Copyright 2012,2013 Jun Wako <[email protected]> | |||||
| This program is free software: you can redistribute it and/or modify | |||||
| it under the terms of the GNU General Public License as published by | |||||
| the Free Software Foundation, either version 2 of the License, or | |||||
| (at your option) any later version. | |||||
| This program is distributed in the hope that it will be useful, | |||||
| but WITHOUT ANY WARRANTY; without even the implied warranty of | |||||
| MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the | |||||
| GNU General Public License for more details. | |||||
| You should have received a copy of the GNU General Public License | |||||
| along with this program. If not, see <http://www.gnu.org/licenses/>. | |||||
| */ | |||||
| #ifndef KEYMAP_COMMON_H | |||||
| #define KEYMAP_COMMON_H | |||||
| #include <stdint.h> | |||||
| #include <stdbool.h> | |||||
| #include "keycode.h" | |||||
| #include "action.h" | |||||
| #include "action_macro.h" | |||||
| #include "report.h" | |||||
| #include "host.h" | |||||
| #include "print.h" | |||||
| #include "debug.h" | |||||
| #include "keymap.h" | |||||
| void gnaplight_toggle(void); | |||||
| void gnaplight_step(void); | |||||
| #define KEYMAP( \ | |||||
| K00, K01, K02, K03, K04, K05, K06, K07, K08, K09, K0a, K0b, \ | |||||
| K10, K11, K12, K13, K14, K15, K16, K17, K18, K19, K1b, \ | |||||
| K20, K21, K22, K23, K24, K25, K26, K27, K28, K29, K2a, K2b, \ | |||||
| K30, K31, K32, K33, K35, K38, K39, K3a, K3b \ | |||||
| ) \ | |||||
| { \ | |||||
| { KC_##K00, KC_##K01, KC_##K02, KC_##K03, KC_##K04, KC_##K05, KC_##K06, KC_##K07, KC_##K08, KC_##K09, KC_##K0a, KC_##K0b }, \ | |||||
| { KC_##K10, KC_##K11, KC_##K12, KC_##K13, KC_##K14, KC_##K15, KC_##K16, KC_##K17, KC_##K18, KC_##K19, KC_NO, KC_##K1b }, \ | |||||
| { KC_##K20, KC_##K21, KC_##K22, KC_##K23, KC_##K24, KC_##K25, KC_##K26, KC_##K27, KC_##K28, KC_##K29, KC_##K2a, KC_##K2b }, \ | |||||
| { KC_##K30, KC_##K31, KC_##K32, KC_##K33, KC_NO, KC_##K35, KC_NO, KC_NO, KC_##K38, KC_##K39, KC_##K3a, KC_##K3b } \ | |||||
| } | |||||
| #endif |
+ 87
- 0
keyboard/kwark/keymap_kwark.c
View File
| #include "keymap_common.h" | |||||
| #include "protocol/serial.h" | |||||
| const uint8_t PROGMEM keymaps[][MATRIX_ROWS][MATRIX_COLS] = { | |||||
| KEYMAP( | |||||
| ESC, Q, W, E, R, T, Y, U, I, O, P, BSPC, | |||||
| FN2, A, S, D, F, G, H, J, K, L, FN3, | |||||
| CAPS, LSFT, Z, X, C, V, B, N, M, COMM, DOT, FN3, | |||||
| LCTL, LGUI, LALT, FN1, SPC, FN0, SCLN, QUOT, SLSH | |||||
| ), | |||||
| KEYMAP( | |||||
| GRV, 1, 2, 3, 4, 5, 6, 7, 8, 9, 0, DELETE, | |||||
| TRNS, TRNS, TRNS, TRNS, TRNS, TRNS, TRNS, MINS, EQL, LBRC, TRNS, | |||||
| TRNS, TRNS, F9, F10, F11, F12, F13, F14, F15, F16, PGUP, TRNS, | |||||
| TRNS, TRNS, TRNS, TRNS, TRNS, TRNS, HOME, PGDN, END | |||||
| ), | |||||
| KEYMAP( | |||||
| FN6, FN7, FN8, FN9, FN10, FN11, FN12, FN13, FN14, FN15, FN16, DELETE, | |||||
| TRNS, TRNS, TRNS, TRNS, TRNS, TRNS, TRNS, FN17, FN18, FN19, TRNS, | |||||
| TRNS, TRNS, F1, F2, F3, F4, F5, F6, F7, F8, PGUP,TRNS, | |||||
| TRNS, TRNS, TRNS, TRNS, TRNS, TRNS, HOME, PGDN, END | |||||
| ), | |||||
| KEYMAP( /* Tab */ | |||||
| ESC, CALC, WHOM, MAIL, MYCM, TRNS, TRNS, TRNS, TRNS, TRNS, PSCR, TRNS, | |||||
| TRNS, TRNS, TRNS, TRNS, TRNS, TRNS, TRNS, TRNS, TRNS, TRNS, TRNS, | |||||
| TRNS, TRNS, FN4, FN5, TRNS, TRNS, TRNS, TRNS, TRNS, TRNS, UP, TRNS, | |||||
| TRNS, TRNS, TRNS, TRNS, TRNS, TRNS, LEFT, DOWN, RGHT | |||||
| ), | |||||
| }; | |||||
| enum function_id { | |||||
| GNAPLED_TOGGLE, | |||||
| GNAPLED_STEP_MODE, | |||||
| }; | |||||
| const action_t PROGMEM fn_actions[] = { | |||||
| [0] = ACTION_LAYER_MOMENTARY(1), | |||||
| [1] = ACTION_LAYER_MOMENTARY(2), | |||||
| [2] = ACTION_LAYER_TAP_KEY(3, KC_TAB), | |||||
| [3] = ACTION_MODS_TAP_KEY(MOD_RSFT, KC_ENT), | |||||
| [4] = ACTION_FUNCTION(GNAPLED_TOGGLE), | |||||
| [5] = ACTION_FUNCTION(GNAPLED_STEP_MODE), | |||||
| [6] = ACTION_MODS_KEY(MOD_LSFT, KC_GRV), | |||||
| [7] = ACTION_MODS_KEY(MOD_LSFT, KC_1), | |||||
| [8] = ACTION_MODS_KEY(MOD_LSFT, KC_2), | |||||
| [9] = ACTION_MODS_KEY(MOD_LSFT, KC_3), | |||||
| [10] = ACTION_MODS_KEY(MOD_LSFT, KC_4), | |||||
| [11] = ACTION_MODS_KEY(MOD_LSFT, KC_5), | |||||
| [12] = ACTION_MODS_KEY(MOD_LSFT, KC_6), | |||||
| [13] = ACTION_MODS_KEY(MOD_LSFT, KC_7), | |||||
| [14] = ACTION_MODS_KEY(MOD_LSFT, KC_8), | |||||
| [15] = ACTION_MODS_KEY(MOD_LSFT, KC_9), | |||||
| [16] = ACTION_MODS_KEY(MOD_LSFT, KC_0), | |||||
| [17] = ACTION_MODS_KEY(MOD_LSFT, KC_MINS), | |||||
| [18] = ACTION_MODS_KEY(MOD_LSFT, KC_EQL), | |||||
| [19] = ACTION_MODS_KEY(MOD_LSFT, KC_LBRC), | |||||
| [20] = ACTION_MODS_KEY(MOD_LSFT, KC_RBRC), | |||||
| [21] = ACTION_MODS_KEY(MOD_LSFT, KC_BSLS), | |||||
| }; | |||||
| void action_function(keyrecord_t *record, uint8_t id, uint8_t opt) { | |||||
| switch (id) { | |||||
| case GNAPLED_TOGGLE: | |||||
| if (record->event.pressed) { | |||||
| gnaplight_toggle(); | |||||
| } | |||||
| break; | |||||
| case GNAPLED_STEP_MODE: | |||||
| if (record->event.pressed) { | |||||
| gnaplight_step(); | |||||
| } | |||||
| break; | |||||
| } | |||||
| } | |||||
| //GNAP keymap functions | |||||
| void gnaplight_step(void) { | |||||
| serial_send(101); | |||||
| } | |||||
| void gnaplight_toggle(void) { | |||||
| serial_send(100); | |||||
| } |
BIN
keyboard/kwark/kwark.bin
View File
BIN
keyboard/kwark/kwark.jpg
View File
{kind=link}
+ 26
- 0
keyboard/kwark/led.c
View File
| /* | |||||
| Copyright 2012 Jun Wako <[email protected]> | |||||
| This program is free software: you can redistribute it and/or modify | |||||
| it under the terms of the GNU General Public License as published by | |||||
| the Free Software Foundation, either version 2 of the License, or | |||||
| (at your option) any later version. | |||||
| This program is distributed in the hope that it will be useful, | |||||
| but WITHOUT ANY WARRANTY; without even the implied warranty of | |||||
| MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the | |||||
| GNU General Public License for more details. | |||||
| You should have received a copy of the GNU General Public License | |||||
| along with this program. If not, see <http://www.gnu.org/licenses/>. | |||||
| */ | |||||
| #include <avr/io.h> | |||||
| #include "stdint.h" | |||||
| #include "led.h" | |||||
| void led_set(uint8_t usb_led) | |||||
| { | |||||
| } |
+ 209
- 0
keyboard/kwark/matrix.c
View File
| /* | |||||
| Copyright 2012 Jun Wako <[email protected]> | |||||
| This program is free software: you can redistribute it and/or modify | |||||
| it under the terms of the GNU General Public License as published by | |||||
| the Free Software Foundation, either version 2 of the License, or | |||||
| (at your option) any later version. | |||||
| This program is distributed in the hope that it will be useful, | |||||
| but WITHOUT ANY WARRANTY; without even the implied warranty of | |||||
| MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the | |||||
| GNU General Public License for more details. | |||||
| You should have received a copy of the GNU General Public License | |||||
| along with this program. If not, see <http://www.gnu.org/licenses/>. | |||||
| */ | |||||
| /* | |||||
| * scan matrix | |||||
| */ | |||||
| #include <stdint.h> | |||||
| #include <stdbool.h> | |||||
| #include <avr/io.h> | |||||
| #include <util/delay.h> | |||||
| #include "print.h" | |||||
| #include "debug.h" | |||||
| #include "util.h" | |||||
| #include "matrix.h" | |||||
| #include "protocol/serial.h" | |||||
| #ifndef DEBOUNCE | |||||
| # define DEBOUNCE 5 | |||||
| #endif | |||||
| static uint8_t debouncing = DEBOUNCE; | |||||
| /* matrix state(1:on, 0:off) */ | |||||
| static matrix_row_t matrix[MATRIX_ROWS]; | |||||
| static matrix_row_t matrix_debouncing[MATRIX_ROWS]; | |||||
| static matrix_row_t read_cols(void); | |||||
| static void init_cols(void); | |||||
| static void unselect_rows(void); | |||||
| static void select_row(uint8_t row); | |||||
| inline | |||||
| uint8_t matrix_rows(void) | |||||
| { | |||||
| return MATRIX_ROWS; | |||||
| } | |||||
| inline | |||||
| uint8_t matrix_cols(void) | |||||
| { | |||||
| return MATRIX_COLS; | |||||
| } | |||||
| void matrix_init(void) | |||||
| { | |||||
| // initialize row and col | |||||
| unselect_rows(); | |||||
| init_cols(); | |||||
| // initialize matrix state: all keys off | |||||
| for (uint8_t i=0; i < MATRIX_ROWS; i++) { | |||||
| matrix[i] = 0; | |||||
| matrix_debouncing[i] = 0; | |||||
| } | |||||
| serial_init(); | |||||
| } | |||||
| uint8_t matrix_scan(void) | |||||
| { | |||||
| for (uint8_t i = 0; i < MATRIX_ROWS; i++) { | |||||
| select_row(i); | |||||
| _delay_us(30); // without this wait read unstable value. | |||||
| matrix_row_t cols = read_cols(); | |||||
| if (matrix_debouncing[i] != cols) { | |||||
| matrix_debouncing[i] = cols; | |||||
| if (debouncing) { | |||||
| debug("bounce!: "); debug_hex(debouncing); debug("\n"); | |||||
| } | |||||
| debouncing = DEBOUNCE; | |||||
| } | |||||
| unselect_rows(); | |||||
| } | |||||
| if (debouncing) { | |||||
| if (--debouncing) { | |||||
| _delay_ms(1); | |||||
| } else { | |||||
| for (uint8_t i = 0; i < MATRIX_ROWS; i++) { | |||||
| matrix[i] = matrix_debouncing[i]; | |||||
| } | |||||
| } | |||||
| } | |||||
| return 1; | |||||
| } | |||||
| bool matrix_is_modified(void) | |||||
| { | |||||
| if (debouncing) return false; | |||||
| return true; | |||||
| } | |||||
| inline | |||||
| bool matrix_is_on(uint8_t row, uint8_t col) | |||||
| { | |||||
| return (matrix[row] & ((matrix_row_t)1<<col)); | |||||
| } | |||||
| inline | |||||
| matrix_row_t matrix_get_row(uint8_t row) | |||||
| { | |||||
| return matrix[row]; | |||||
| } | |||||
| void matrix_print(void) | |||||
| { | |||||
| print("\nr/c 0123456789ABCDEF\n"); | |||||
| for (uint8_t row = 0; row < MATRIX_ROWS; row++) { | |||||
| phex(row); print(": "); | |||||
| pbin_reverse16(matrix_get_row(row)); | |||||
| print("\n"); | |||||
| } | |||||
| } | |||||
| uint8_t matrix_key_count(void) | |||||
| { | |||||
| uint8_t count = 0; | |||||
| for (uint8_t i = 0; i < MATRIX_ROWS; i++) { | |||||
| count += bitpop16(matrix[i]); | |||||
| } | |||||
| return count; | |||||
| } | |||||
| /* Column pin configuration | |||||
| * col: 0 1 2 3 4 5 6 7 8 9 10 11 | |||||
| * pin: D7 E6 B4 B5 B6 B2 B3 B1 F7 F6 F5 F4 | |||||
| */ | |||||
| static void init_cols(void) | |||||
| { | |||||
| // Input with pull-up(DDR:0, PORT:1) | |||||
| DDRF &= ~(1<<4 | 1<<5 | 1<<6 | 1<<7); | |||||
| PORTF |= (1<<4 | 1<<5 | 1<<6 | 1<<7); | |||||
| DDRE &= ~(1<<6); | |||||
| PORTE |= (1<<6); | |||||
| DDRD &= ~(1<<7); | |||||
| PORTD |= (1<<7); | |||||
| DDRB &= ~(1<<1 | 1<<2 | 1<<3 | 1<<4 | 1<<5 | 1<<6); | |||||
| PORTB |= (1<<1 | 1<<2 | 1<<3 | 1<<4 | 1<<5 | 1<<6); | |||||
| } | |||||
| static matrix_row_t read_cols(void) | |||||
| { | |||||
| return (PIND&(1<<7) ? 0 : (1<<0)) | | |||||
| (PINE&(1<<6) ? 0 : (1<<1)) | | |||||
| (PINB&(1<<4) ? 0 : (1<<2)) | | |||||
| (PINB&(1<<5) ? 0 : (1<<3)) | | |||||
| (PINB&(1<<6) ? 0 : (1<<4)) | | |||||
| (PINB&(1<<2) ? 0 : (1<<5)) | | |||||
| (PINB&(1<<3) ? 0 : (1<<6)) | | |||||
| (PINB&(1<<1) ? 0 : (1<<7)) | | |||||
| (PINF&(1<<7) ? 0 : (1<<8)) | | |||||
| (PINF&(1<<6) ? 0 : (1<<9)) | | |||||
| (PINF&(1<<5) ? 0 : (1<<10)) | | |||||
| (PINF&(1<<4) ? 0 : (1<<11)); | |||||
| } | |||||
| /* Row pin configuration | |||||
| * row: 0 1 2 3 | |||||
| * pin: D1 D0 D4 C6 | |||||
| */ | |||||
| static void unselect_rows(void) | |||||
| { | |||||
| // Hi-Z(DDR:0, PORT:0) to unselect | |||||
| DDRD &= ~0b00010011; | |||||
| PORTD &= ~0b00010011; | |||||
| DDRC &= ~0b01000000; | |||||
| PORTC &= ~0b01000000; | |||||
| } | |||||
| static void select_row(uint8_t row) | |||||
| { | |||||
| // Output low(DDR:1, PORT:0) to select | |||||
| switch (row) { | |||||
| case 0: | |||||
| DDRD |= (1<<1); | |||||
| PORTD &= ~(1<<1); | |||||
| break; | |||||
| case 1: | |||||
| DDRD |= (1<<0); | |||||
| PORTD &= ~(1<<0); | |||||
| break; | |||||
| case 2: | |||||
| DDRD |= (1<<4); | |||||
| PORTD &= ~(1<<4); | |||||
| break; | |||||
| case 3: | |||||
| DDRC |= (1<<6); | |||||
| PORTC &= ~(1<<6); | |||||
| break; | |||||
| } | |||||
| } |
+ 38
- 0
keyboard/kwark/readme.md
View File
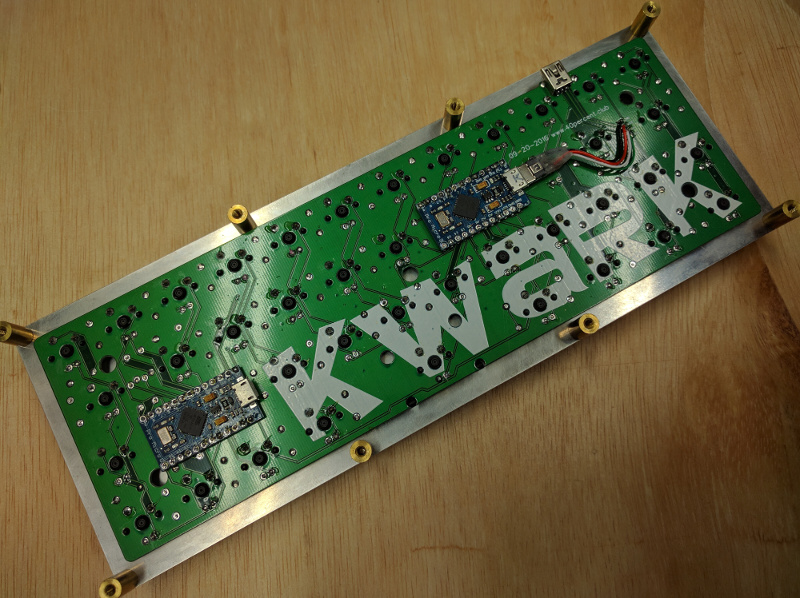
| ## KWARK keyboard firmware | |||||
|  | |||||
| ====================== | |||||
| KWARK dual matrix, dual controller. Per key LED control, reactive lighting. | |||||
| Based on the GNAP! | |||||
| Dual Pro Micro's. One running TMK, the other running an Arduino sketch driving the LEDs. Pro Micro's are connected to each other via hardware serial UART. | |||||
| Pinout | |||||
| Rows D1, D0, D4, C6 | |||||
| Cols D7, E6, B4, B5, B6, B2, B3, B1, F7, F6, F5, F4 | |||||
| keymap_gnap.c contains functions to send bytes to the LED controller. The Arduino code interprets these to change modes or brightness. | |||||
| //GNAP keymap functions | |||||
| void gnaplight_step(void) { | |||||
| serial_send(101); | |||||
| } | |||||
| void gnaplight_toggle(void) { | |||||
| serial_send(100); | |||||
| } | |||||
| \tmk_core\common\keyboard.c was modified to send the row/column of the key being pressed encoded as as single byte over the serial link to the LED controller. | |||||
| #ifdef GNAP_ENABLE | |||||
| //send single byte with value of row column | |||||
| serial_send((r*16)+c); | |||||
| #endif | |||||
| The example Arduino sketch [LED_FastGPIO.ino](LED_FastGPIO.ino) uses the fastGPIO and TimerOne libraries. These can be installed with the Library manager. | |||||
| [FastGPIO](https://github.com/pololu/fastgpio-arduino) | |||||
| [TimerOne](https://www.pjrc.com/teensy/td_libs_TimerOne.html) | |||||
| [Original Quark Keyboard](https://deskthority.net/workshop-f7/quark-keyboard-40-staggered-layout-that-fits-all-planck-cases-t10474.html) |
Loading…