
 di0ib
7 лет назад
di0ib
7 лет назад
18 измененных файлов: 1945 добавлений и 0 удалений
+ 80
- 0
keyboard/stm32_f103_planck/Makefile
Просмотреть файл
| @@ -0,0 +1,80 @@ | |||
| # Target file name (without extension). | |||
| PROJECT = ch | |||
| # Directory common source files exist | |||
| TMK_DIR = ../../tmk_core | |||
| # Directory keyboard dependent files exist | |||
| TARGET_DIR = . | |||
| # project specific files | |||
| SRC = matrix.c \ | |||
| keymap_common.c \ | |||
| led.c | |||
| ifdef KEYMAP | |||
| SRC := keymap_$(KEYMAP).c $(SRC) | |||
| else | |||
| SRC := keymap_planck.c $(SRC) | |||
| endif | |||
| CONFIG_H = config.h | |||
| # GENERIC STM32F103C8T6 board - stm32duino bootloader | |||
| #OPT_DEFS = -DCORTEX_VTOR_INIT=0x2000 | |||
| #MCU_LDSCRIPT = STM32F103x8_stm32duino_bootloader | |||
| #BOARD = GENERIC_STM32_F103 | |||
| # GENERIC STM32F103C8T6 board - no bootloader (programmer over serial or SWD) | |||
| OPT_DEFS = | |||
| MCU_LDSCRIPT = STM32F103x8 | |||
| BOARD = GENERIC_STM32_F103 | |||
| # MAPLE MINI | |||
| # OPT_DEFS = -DCORTEX_VTOR_INIT=0x5000 | |||
| # MCU_LDSCRIPT = STM32F103xB_maplemini_bootloader | |||
| # BOARD = MAPLEMINI_STM32_F103 | |||
| ## chip/board settings | |||
| # the next two should match the directories in | |||
| # <chibios>/os/hal/ports/$(MCU_FAMILY)/$(MCU_SERIES) | |||
| MCU_FAMILY = STM32 | |||
| MCU_SERIES = STM32F1xx | |||
| # linker script to use | |||
| # it should exist either in <chibios>/os/common/ports/ARMCMx/compilers/GCC/ld/ | |||
| # or <this_dir>/ld/ | |||
| # startup code to use | |||
| # is should exist in <chibios>/os/common/ports/ARMCMx/compilers/GCC/mk/ | |||
| MCU_STARTUP = stm32f1xx | |||
| # it should exist either in <chibios>/os/hal/boards/ | |||
| # or <this_dir>/boards | |||
| # Cortex version | |||
| # Teensy LC is cortex-m0; Teensy 3.x are cortex-m4 | |||
| MCU = cortex-m3 | |||
| # ARM version, CORTEX-M0/M1 are 6, CORTEX-M3/M4/M7 are 7 | |||
| ARMV = 7 | |||
| # If you want to be able to jump to bootloader from firmware on STM32 MCUs, | |||
| # set the correct BOOTLOADER_ADDRESS. Either set it here, or define it in | |||
| # ./bootloader_defs.h or in ./boards/<FOO>/bootloader_defs.h (if you have | |||
| # a custom board definition that you plan to reuse). | |||
| # If you're not setting it here, leave it commented out. | |||
| # It is chip dependent, the correct number can be looked up here (page 175): | |||
| # http://www.st.com/web/en/resource/technical/document/application_note/CD00167594.pdf | |||
| # This also requires a patch to chibios: | |||
| # <tmk_dir>/tmk_core/tool/chibios/ch-bootloader-jump.patch | |||
| #STM32_BOOTLOADER_ADDRESS = 0x1FFFC800 | |||
| # Build Options | |||
| # comment out to disable the options. | |||
| # | |||
| #BOOTMAGIC_ENABLE = yes # Virtual DIP switch configuration | |||
| ## BOOTMAGIC is not supported on STM32 chips yet. | |||
| MOUSEKEY_ENABLE = yes # Mouse keys | |||
| EXTRAKEY_ENABLE = yes # Audio control and System control | |||
| # CONSOLE_ENABLE = yes # Console for debug | |||
| COMMAND_ENABLE = yes # Commands for debug and configuration | |||
| SLEEP_LED_ENABLE = no # Breathing sleep LED during USB suspend | |||
| NKRO_ENABLE = yes # USB Nkey Rollover | |||
| include $(TMK_DIR)/tool/chibios/common.mk | |||
| include $(TMK_DIR)/tool/chibios/chibios.mk | |||
+ 49
- 0
keyboard/stm32_f103_planck/boards/GENERIC_STM32_F103/board.c
Просмотреть файл
| @@ -0,0 +1,49 @@ | |||
| /* | |||
| ChibiOS - Copyright (C) 2006..2015 Giovanni Di Sirio | |||
| Licensed under the Apache License, Version 2.0 (the "License"); | |||
| you may not use this file except in compliance with the License. | |||
| You may obtain a copy of the License at | |||
| http://www.apache.org/licenses/LICENSE-2.0 | |||
| Unless required by applicable law or agreed to in writing, software | |||
| distributed under the License is distributed on an "AS IS" BASIS, | |||
| WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. | |||
| See the License for the specific language governing permissions and | |||
| limitations under the License. | |||
| */ | |||
| #include "hal.h" | |||
| /** | |||
| * @brief PAL setup. | |||
| * @details Digital I/O ports static configuration as defined in @p board.h. | |||
| * This variable is used by the HAL when initializing the PAL driver. | |||
| */ | |||
| #if HAL_USE_PAL || defined(__DOXYGEN__) | |||
| const PALConfig pal_default_config = | |||
| { | |||
| {VAL_GPIOAODR, VAL_GPIOACRL, VAL_GPIOACRH}, | |||
| {VAL_GPIOBODR, VAL_GPIOBCRL, VAL_GPIOBCRH}, | |||
| {VAL_GPIOCODR, VAL_GPIOCCRL, VAL_GPIOCCRH}, | |||
| {VAL_GPIODODR, VAL_GPIODCRL, VAL_GPIODCRH}, | |||
| {VAL_GPIOEODR, VAL_GPIOECRL, VAL_GPIOECRH}, | |||
| }; | |||
| #endif | |||
| /* | |||
| * Early initialization code. | |||
| * This initialization must be performed just after stack setup and before | |||
| * any other initialization. | |||
| */ | |||
| void __early_init(void) { | |||
| stm32_clock_init(); | |||
| } | |||
| /* | |||
| * Board-specific initialization code. | |||
| */ | |||
| void boardInit(void) { | |||
| } | |||
+ 166
- 0
keyboard/stm32_f103_planck/boards/GENERIC_STM32_F103/board.h
Просмотреть файл
| @@ -0,0 +1,166 @@ | |||
| /* | |||
| ChibiOS - Copyright (C) 2006..2015 Giovanni Di Sirio | |||
| Licensed under the Apache License, Version 2.0 (the "License"); | |||
| you may not use this file except in compliance with the License. | |||
| You may obtain a copy of the License at | |||
| http://www.apache.org/licenses/LICENSE-2.0 | |||
| Unless required by applicable law or agreed to in writing, software | |||
| distributed under the License is distributed on an "AS IS" BASIS, | |||
| WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. | |||
| See the License for the specific language governing permissions and | |||
| limitations under the License. | |||
| */ | |||
| #ifndef _BOARD_H_ | |||
| #define _BOARD_H_ | |||
| /* | |||
| * Setup for a Generic STM32F103 board. | |||
| */ | |||
| /* | |||
| * Board identifier. | |||
| */ | |||
| #define BOARD_GENERIC_STM32_F103 | |||
| #define BOARD_NAME "Generic STM32F103x board" | |||
| /* | |||
| * Board frequencies. | |||
| */ | |||
| #define STM32_LSECLK 32768 | |||
| #define STM32_HSECLK 8000000 | |||
| /* | |||
| * MCU type, supported types are defined in ./os/hal/platforms/hal_lld.h. | |||
| */ | |||
| #define STM32F103xB | |||
| /* | |||
| * IO pins assignments | |||
| */ | |||
| /* on-board */ | |||
| #define GPIOC_LED 13 | |||
| #define GPIOD_OSC_IN 0 | |||
| #define GPIOD_OSC_OUT 1 | |||
| /* In case your board has a "USB enable" hardware | |||
| controlled by a pin, define it here. (It could be just | |||
| a 1.5k resistor connected to D+ line.) | |||
| */ | |||
| /* | |||
| #define GPIOB_USB_DISC 10 | |||
| */ | |||
| /* | |||
| * I/O ports initial setup, this configuration is established soon after reset | |||
| * in the initialization code. | |||
| * | |||
| * The digits have the following meaning: | |||
| * 0 - Analog input. | |||
| * 1 - Push Pull output 10MHz. | |||
| * 2 - Push Pull output 2MHz. | |||
| * 3 - Push Pull output 50MHz. | |||
| * 4 - Digital input. | |||
| * 5 - Open Drain output 10MHz. | |||
| * 6 - Open Drain output 2MHz. | |||
| * 7 - Open Drain output 50MHz. | |||
| * 8 - Digital input with PullUp or PullDown resistor depending on ODR. | |||
| * 9 - Alternate Push Pull output 10MHz. | |||
| * A - Alternate Push Pull output 2MHz. | |||
| * B - Alternate Push Pull output 50MHz. | |||
| * C - Reserved. | |||
| * D - Alternate Open Drain output 10MHz. | |||
| * E - Alternate Open Drain output 2MHz. | |||
| * F - Alternate Open Drain output 50MHz. | |||
| * Please refer to the STM32 Reference Manual for details. | |||
| */ | |||
| /* | |||
| * Port A setup. | |||
| * Everything input with pull-up except: | |||
| * PA2 - Alternate output (USART2 TX). | |||
| * PA3 - Normal input (USART2 RX). | |||
| * PA9 - Alternate output (USART1 TX). | |||
| * PA10 - Normal input (USART1 RX). | |||
| */ | |||
| #define VAL_GPIOACRL 0x88884B88 /* PA7...PA0 */ | |||
| #define VAL_GPIOACRH 0x888884B8 /* PA15...PA8 */ | |||
| #define VAL_GPIOAODR 0xFFFFFFFF | |||
| /* | |||
| * Port B setup. | |||
| * Everything input with pull-up except: | |||
| * PB10 - Push Pull output (USB switch). | |||
| */ | |||
| #define VAL_GPIOBCRL 0x88888888 /* PB7...PB0 */ | |||
| #define VAL_GPIOBCRH 0x88888388 /* PB15...PB8 */ | |||
| #define VAL_GPIOBODR 0xFFFFFFFF | |||
| /* | |||
| * Port C setup. | |||
| * Everything input with pull-up except: | |||
| * PC13 - Push Pull output (LED). | |||
| */ | |||
| #define VAL_GPIOCCRL 0x88888888 /* PC7...PC0 */ | |||
| #define VAL_GPIOCCRH 0x88388888 /* PC15...PC8 */ | |||
| #define VAL_GPIOCODR 0xFFFFFFFF | |||
| /* | |||
| * Port D setup. | |||
| * Everything input with pull-up except: | |||
| * PD0 - Normal input (XTAL). | |||
| * PD1 - Normal input (XTAL). | |||
| */ | |||
| #define VAL_GPIODCRL 0x88888844 /* PD7...PD0 */ | |||
| #define VAL_GPIODCRH 0x88888888 /* PD15...PD8 */ | |||
| #define VAL_GPIODODR 0xFFFFFFFF | |||
| /* | |||
| * Port E setup. | |||
| * Everything input with pull-up except: | |||
| */ | |||
| #define VAL_GPIOECRL 0x88888888 /* PE7...PE0 */ | |||
| #define VAL_GPIOECRH 0x88888888 /* PE15...PE8 */ | |||
| #define VAL_GPIOEODR 0xFFFFFFFF | |||
| /* | |||
| * USB bus activation macro, required by the USB driver. | |||
| */ | |||
| /* The point is that most of the generic STM32F103* boards | |||
| have a 1.5k resistor connected on one end to the D+ line | |||
| and on the other end to some pin. Or even a slightly more | |||
| complicated "USB enable" circuit, controlled by a pin. | |||
| That should go here. | |||
| However on some boards (e.g. one that I have), there's no | |||
| such hardware. In which case it's better to not do anything. | |||
| */ | |||
| /* | |||
| #define usb_lld_connect_bus(usbp) palClearPad(GPIOB, GPIOB_USB_DISC) | |||
| */ | |||
| #define usb_lld_connect_bus(usbp) palSetPadMode(GPIOA, 12, PAL_MODE_INPUT); | |||
| /* | |||
| * USB bus de-activation macro, required by the USB driver. | |||
| */ | |||
| /* | |||
| #define usb_lld_disconnect_bus(usbp) palSetPad(GPIOB, GPIOB_USB_DISC) | |||
| */ | |||
| #define usb_lld_disconnect_bus(usbp) palSetPadMode(GPIOA, 12, PAL_MODE_OUTPUT_PUSHPULL); palClearPad(GPIOA, 12); | |||
| #if !defined(_FROM_ASM_) | |||
| #ifdef __cplusplus | |||
| extern "C" { | |||
| #endif | |||
| void boardInit(void); | |||
| #ifdef __cplusplus | |||
| } | |||
| #endif | |||
| #endif /* _FROM_ASM_ */ | |||
| #endif /* _BOARD_H_ */ | |||
+ 5
- 0
keyboard/stm32_f103_planck/boards/GENERIC_STM32_F103/board.mk
Просмотреть файл
| @@ -0,0 +1,5 @@ | |||
| # List of all the board related files. | |||
| BOARDSRC = ./boards/GENERIC_STM32_F103/board.c | |||
| # Required include directories | |||
| BOARDINC = ./boards/GENERIC_STM32_F103 | |||
Двоичные данные
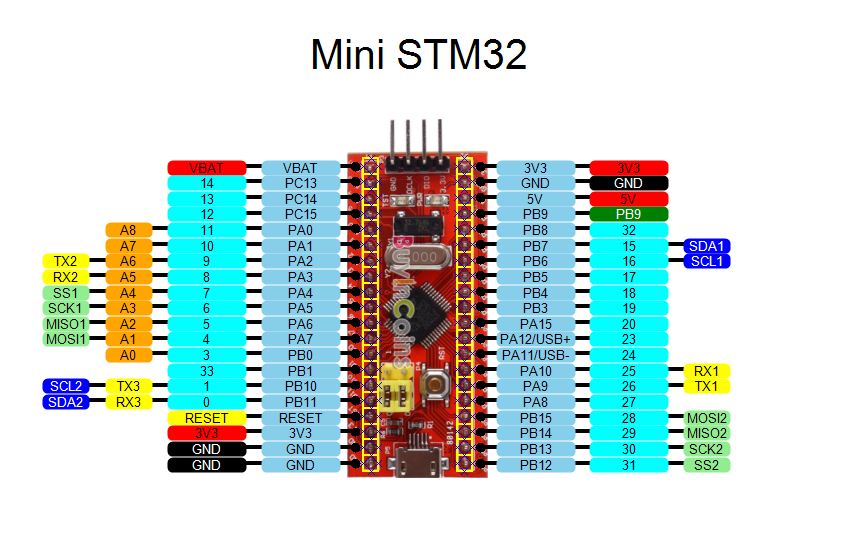
keyboard/stm32_f103_planck/boards/GENERIC_STM32_F103/mini_stm32_mapping.png
Просмотреть файл
{kind=link}
Двоичные данные
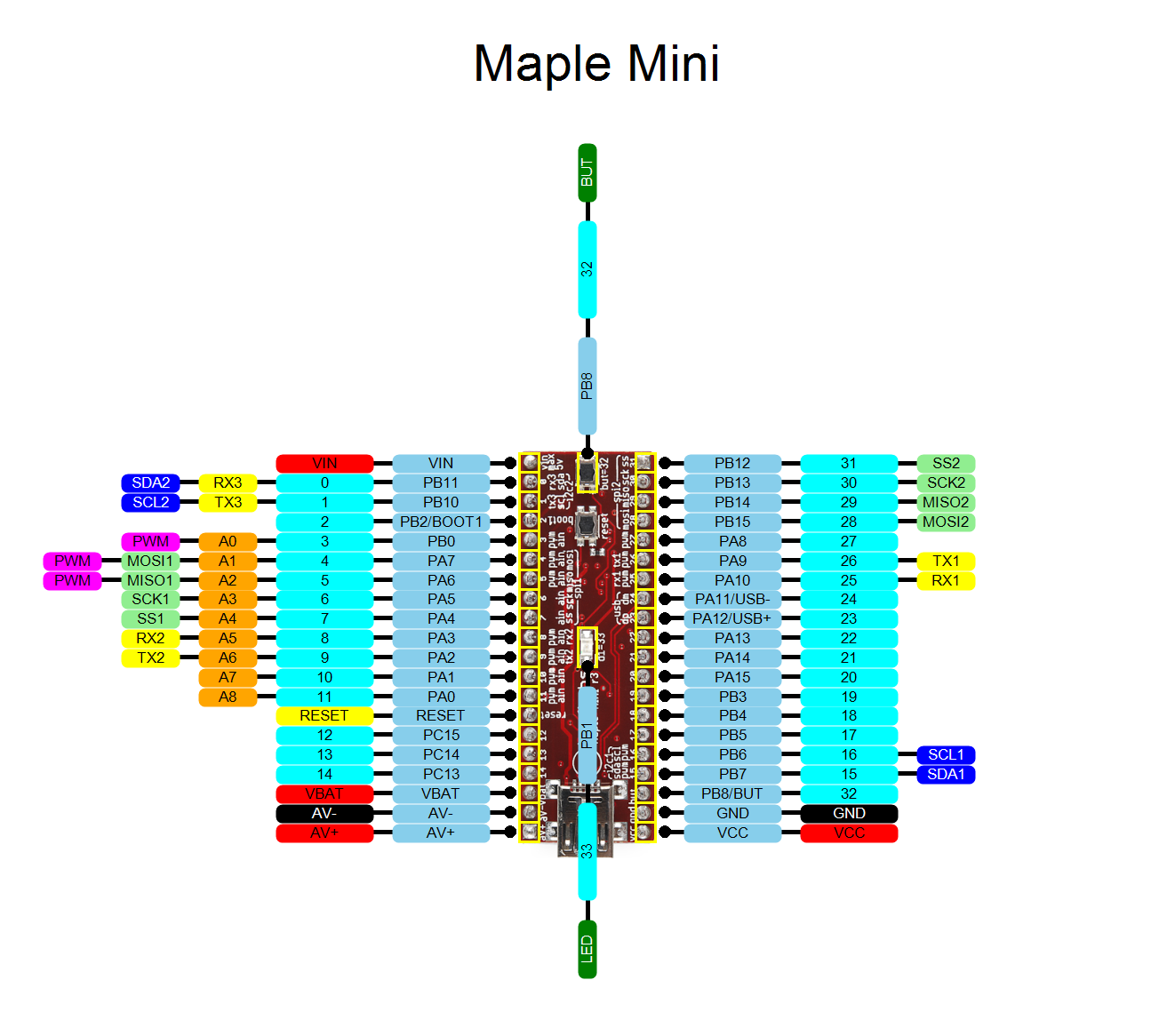
keyboard/stm32_f103_planck/boards/maple_mini_mapping.png
Просмотреть файл
{kind=link}
+ 10
- 0
keyboard/stm32_f103_planck/bootloader_defs.h
Просмотреть файл
| @@ -0,0 +1,10 @@ | |||
| /* Address for jumping to bootloader on STM32 chips. */ | |||
| /* It is chip dependent, the correct number can be looked up here (page 175): | |||
| * http://www.st.com/web/en/resource/technical/document/application_note/CD00167594.pdf | |||
| * This also requires a patch to chibios: | |||
| * <tmk_dir>/tmk_core/tool/chibios/ch-bootloader-jump.patch | |||
| */ | |||
| // STM32F103* does NOT have an USB bootloader in ROM (only serial), | |||
| // so setting anything here does not make much sense | |||
| // #define STM32_BOOTLOADER_ADDRESS 0x1FFFC800 | |||
+ 524
- 0
keyboard/stm32_f103_planck/chconf.h
Просмотреть файл
| @@ -0,0 +1,524 @@ | |||
| /* | |||
| ChibiOS - Copyright (C) 2006..2015 Giovanni Di Sirio | |||
| Licensed under the Apache License, Version 2.0 (the "License"); | |||
| you may not use this file except in compliance with the License. | |||
| You may obtain a copy of the License at | |||
| http://www.apache.org/licenses/LICENSE-2.0 | |||
| Unless required by applicable law or agreed to in writing, software | |||
| distributed under the License is distributed on an "AS IS" BASIS, | |||
| WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. | |||
| See the License for the specific language governing permissions and | |||
| limitations under the License. | |||
| */ | |||
| /** | |||
| * @file templates/chconf.h | |||
| * @brief Configuration file template. | |||
| * @details A copy of this file must be placed in each project directory, it | |||
| * contains the application specific kernel settings. | |||
| * | |||
| * @addtogroup config | |||
| * @details Kernel related settings and hooks. | |||
| * @{ | |||
| */ | |||
| #ifndef CHCONF_H | |||
| #define CHCONF_H | |||
| #define _CHIBIOS_RT_CONF_ | |||
| /*===========================================================================*/ | |||
| /** | |||
| * @name System timers settings | |||
| * @{ | |||
| */ | |||
| /*===========================================================================*/ | |||
| /** | |||
| * @brief System time counter resolution. | |||
| * @note Allowed values are 16 or 32 bits. | |||
| */ | |||
| #define CH_CFG_ST_RESOLUTION 16 | |||
| /** | |||
| * @brief System tick frequency. | |||
| * @details Frequency of the system timer that drives the system ticks. This | |||
| * setting also defines the system tick time unit. | |||
| */ | |||
| #define CH_CFG_ST_FREQUENCY 2000 | |||
| /** | |||
| * @brief Time delta constant for the tick-less mode. | |||
| * @note If this value is zero then the system uses the classic | |||
| * periodic tick. This value represents the minimum number | |||
| * of ticks that is safe to specify in a timeout directive. | |||
| * The value one is not valid, timeouts are rounded up to | |||
| * this value. | |||
| */ | |||
| #define CH_CFG_ST_TIMEDELTA 2 | |||
| /** @} */ | |||
| /*===========================================================================*/ | |||
| /** | |||
| * @name Kernel parameters and options | |||
| * @{ | |||
| */ | |||
| /*===========================================================================*/ | |||
| /** | |||
| * @brief Round robin interval. | |||
| * @details This constant is the number of system ticks allowed for the | |||
| * threads before preemption occurs. Setting this value to zero | |||
| * disables the preemption for threads with equal priority and the | |||
| * round robin becomes cooperative. Note that higher priority | |||
| * threads can still preempt, the kernel is always preemptive. | |||
| * @note Disabling the round robin preemption makes the kernel more compact | |||
| * and generally faster. | |||
| * @note The round robin preemption is not supported in tickless mode and | |||
| * must be set to zero in that case. | |||
| */ | |||
| #define CH_CFG_TIME_QUANTUM 0 | |||
| /** | |||
| * @brief Managed RAM size. | |||
| * @details Size of the RAM area to be managed by the OS. If set to zero | |||
| * then the whole available RAM is used. The core memory is made | |||
| * available to the heap allocator and/or can be used directly through | |||
| * the simplified core memory allocator. | |||
| * | |||
| * @note In order to let the OS manage the whole RAM the linker script must | |||
| * provide the @p __heap_base__ and @p __heap_end__ symbols. | |||
| * @note Requires @p CH_CFG_USE_MEMCORE. | |||
| */ | |||
| #define CH_CFG_MEMCORE_SIZE 0 | |||
| /** | |||
| * @brief Idle thread automatic spawn suppression. | |||
| * @details When this option is activated the function @p chSysInit() | |||
| * does not spawn the idle thread. The application @p main() | |||
| * function becomes the idle thread and must implement an | |||
| * infinite loop. | |||
| */ | |||
| #define CH_CFG_NO_IDLE_THREAD FALSE | |||
| /* Use __WFI in the idle thread for waiting. Does lower the power | |||
| * consumption. */ | |||
| #define CORTEX_ENABLE_WFI_IDLE TRUE | |||
| /** @} */ | |||
| /*===========================================================================*/ | |||
| /** | |||
| * @name Performance options | |||
| * @{ | |||
| */ | |||
| /*===========================================================================*/ | |||
| /** | |||
| * @brief OS optimization. | |||
| * @details If enabled then time efficient rather than space efficient code | |||
| * is used when two possible implementations exist. | |||
| * | |||
| * @note This is not related to the compiler optimization options. | |||
| * @note The default is @p TRUE. | |||
| */ | |||
| #define CH_CFG_OPTIMIZE_SPEED TRUE | |||
| /** @} */ | |||
| /*===========================================================================*/ | |||
| /** | |||
| * @name Subsystem options | |||
| * @{ | |||
| */ | |||
| /*===========================================================================*/ | |||
| /** | |||
| * @brief Time Measurement APIs. | |||
| * @details If enabled then the time measurement APIs are included in | |||
| * the kernel. | |||
| * | |||
| * @note The default is @p TRUE. | |||
| */ | |||
| #define CH_CFG_USE_TM FALSE | |||
| /** | |||
| * @brief Threads registry APIs. | |||
| * @details If enabled then the registry APIs are included in the kernel. | |||
| * | |||
| * @note The default is @p TRUE. | |||
| */ | |||
| #define CH_CFG_USE_REGISTRY TRUE | |||
| /** | |||
| * @brief Threads synchronization APIs. | |||
| * @details If enabled then the @p chThdWait() function is included in | |||
| * the kernel. | |||
| * | |||
| * @note The default is @p TRUE. | |||
| */ | |||
| #define CH_CFG_USE_WAITEXIT TRUE | |||
| /** | |||
| * @brief Semaphores APIs. | |||
| * @details If enabled then the Semaphores APIs are included in the kernel. | |||
| * | |||
| * @note The default is @p TRUE. | |||
| */ | |||
| #define CH_CFG_USE_SEMAPHORES TRUE | |||
| /** | |||
| * @brief Semaphores queuing mode. | |||
| * @details If enabled then the threads are enqueued on semaphores by | |||
| * priority rather than in FIFO order. | |||
| * | |||
| * @note The default is @p FALSE. Enable this if you have special | |||
| * requirements. | |||
| * @note Requires @p CH_CFG_USE_SEMAPHORES. | |||
| */ | |||
| #define CH_CFG_USE_SEMAPHORES_PRIORITY FALSE | |||
| /** | |||
| * @brief Mutexes APIs. | |||
| * @details If enabled then the mutexes APIs are included in the kernel. | |||
| * | |||
| * @note The default is @p TRUE. | |||
| */ | |||
| #define CH_CFG_USE_MUTEXES TRUE | |||
| /** | |||
| * @brief Enables recursive behavior on mutexes. | |||
| * @note Recursive mutexes are heavier and have an increased | |||
| * memory footprint. | |||
| * | |||
| * @note The default is @p FALSE. | |||
| * @note Requires @p CH_CFG_USE_MUTEXES. | |||
| */ | |||
| #define CH_CFG_USE_MUTEXES_RECURSIVE FALSE | |||
| /** | |||
| * @brief Conditional Variables APIs. | |||
| * @details If enabled then the conditional variables APIs are included | |||
| * in the kernel. | |||
| * | |||
| * @note The default is @p TRUE. | |||
| * @note Requires @p CH_CFG_USE_MUTEXES. | |||
| */ | |||
| #define CH_CFG_USE_CONDVARS TRUE | |||
| /** | |||
| * @brief Conditional Variables APIs with timeout. | |||
| * @details If enabled then the conditional variables APIs with timeout | |||
| * specification are included in the kernel. | |||
| * | |||
| * @note The default is @p TRUE. | |||
| * @note Requires @p CH_CFG_USE_CONDVARS. | |||
| */ | |||
| #define CH_CFG_USE_CONDVARS_TIMEOUT FALSE | |||
| /** | |||
| * @brief Events Flags APIs. | |||
| * @details If enabled then the event flags APIs are included in the kernel. | |||
| * | |||
| * @note The default is @p TRUE. | |||
| */ | |||
| #define CH_CFG_USE_EVENTS TRUE | |||
| /** | |||
| * @brief Events Flags APIs with timeout. | |||
| * @details If enabled then the events APIs with timeout specification | |||
| * are included in the kernel. | |||
| * | |||
| * @note The default is @p TRUE. | |||
| * @note Requires @p CH_CFG_USE_EVENTS. | |||
| */ | |||
| #define CH_CFG_USE_EVENTS_TIMEOUT TRUE | |||
| /** | |||
| * @brief Synchronous Messages APIs. | |||
| * @details If enabled then the synchronous messages APIs are included | |||
| * in the kernel. | |||
| * | |||
| * @note The default is @p TRUE. | |||
| */ | |||
| #define CH_CFG_USE_MESSAGES TRUE | |||
| /** | |||
| * @brief Synchronous Messages queuing mode. | |||
| * @details If enabled then messages are served by priority rather than in | |||
| * FIFO order. | |||
| * | |||
| * @note The default is @p FALSE. Enable this if you have special | |||
| * requirements. | |||
| * @note Requires @p CH_CFG_USE_MESSAGES. | |||
| */ | |||
| #define CH_CFG_USE_MESSAGES_PRIORITY FALSE | |||
| /** | |||
| * @brief Mailboxes APIs. | |||
| * @details If enabled then the asynchronous messages (mailboxes) APIs are | |||
| * included in the kernel. | |||
| * | |||
| * @note The default is @p TRUE. | |||
| * @note Requires @p CH_CFG_USE_SEMAPHORES. | |||
| */ | |||
| #define CH_CFG_USE_MAILBOXES TRUE | |||
| /** | |||
| * @brief Core Memory Manager APIs. | |||
| * @details If enabled then the core memory manager APIs are included | |||
| * in the kernel. | |||
| * | |||
| * @note The default is @p TRUE. | |||
| */ | |||
| #define CH_CFG_USE_MEMCORE TRUE | |||
| /** | |||
| * @brief Heap Allocator APIs. | |||
| * @details If enabled then the memory heap allocator APIs are included | |||
| * in the kernel. | |||
| * | |||
| * @note The default is @p TRUE. | |||
| * @note Requires @p CH_CFG_USE_MEMCORE and either @p CH_CFG_USE_MUTEXES or | |||
| * @p CH_CFG_USE_SEMAPHORES. | |||
| * @note Mutexes are recommended. | |||
| */ | |||
| #define CH_CFG_USE_HEAP TRUE | |||
| /** | |||
| * @brief Memory Pools Allocator APIs. | |||
| * @details If enabled then the memory pools allocator APIs are included | |||
| * in the kernel. | |||
| * | |||
| * @note The default is @p TRUE. | |||
| */ | |||
| #define CH_CFG_USE_MEMPOOLS FALSE | |||
| /** | |||
| * @brief Dynamic Threads APIs. | |||
| * @details If enabled then the dynamic threads creation APIs are included | |||
| * in the kernel. | |||
| * | |||
| * @note The default is @p TRUE. | |||
| * @note Requires @p CH_CFG_USE_WAITEXIT. | |||
| * @note Requires @p CH_CFG_USE_HEAP and/or @p CH_CFG_USE_MEMPOOLS. | |||
| */ | |||
| #define CH_CFG_USE_DYNAMIC FALSE | |||
| /** @} */ | |||
| /*===========================================================================*/ | |||
| /** | |||
| * @name Debug options | |||
| * @{ | |||
| */ | |||
| /*===========================================================================*/ | |||
| /** | |||
| * @brief Debug option, kernel statistics. | |||
| * | |||
| * @note The default is @p FALSE. | |||
| */ | |||
| #define CH_DBG_STATISTICS FALSE | |||
| /** | |||
| * @brief Debug option, system state check. | |||
| * @details If enabled the correct call protocol for system APIs is checked | |||
| * at runtime. | |||
| * | |||
| * @note The default is @p FALSE. | |||
| */ | |||
| #define CH_DBG_SYSTEM_STATE_CHECK FALSE | |||
| /** | |||
| * @brief Debug option, parameters checks. | |||
| * @details If enabled then the checks on the API functions input | |||
| * parameters are activated. | |||
| * | |||
| * @note The default is @p FALSE. | |||
| */ | |||
| #define CH_DBG_ENABLE_CHECKS FALSE | |||
| /** | |||
| * @brief Debug option, consistency checks. | |||
| * @details If enabled then all the assertions in the kernel code are | |||
| * activated. This includes consistency checks inside the kernel, | |||
| * runtime anomalies and port-defined checks. | |||
| * | |||
| * @note The default is @p FALSE. | |||
| */ | |||
| #define CH_DBG_ENABLE_ASSERTS FALSE | |||
| /** | |||
| * @brief Debug option, trace buffer. | |||
| * @details If enabled then the trace buffer is activated. | |||
| * | |||
| * @note The default is @p CH_DBG_TRACE_MASK_DISABLED. | |||
| */ | |||
| #define CH_DBG_TRACE_MASK CH_DBG_TRACE_MASK_DISABLED | |||
| /** | |||
| * @brief Trace buffer entries. | |||
| * @note The trace buffer is only allocated if @p CH_DBG_TRACE_MASK is | |||
| * different from @p CH_DBG_TRACE_MASK_DISABLED. | |||
| */ | |||
| #define CH_DBG_TRACE_BUFFER_SIZE 128 | |||
| /** | |||
| * @brief Debug option, stack checks. | |||
| * @details If enabled then a runtime stack check is performed. | |||
| * | |||
| * @note The default is @p FALSE. | |||
| * @note The stack check is performed in a architecture/port dependent way. | |||
| * It may not be implemented or some ports. | |||
| * @note The default failure mode is to halt the system with the global | |||
| * @p panic_msg variable set to @p NULL. | |||
| */ | |||
| #define CH_DBG_ENABLE_STACK_CHECK FALSE | |||
| /** | |||
| * @brief Debug option, stacks initialization. | |||
| * @details If enabled then the threads working area is filled with a byte | |||
| * value when a thread is created. This can be useful for the | |||
| * runtime measurement of the used stack. | |||
| * | |||
| * @note The default is @p FALSE. | |||
| */ | |||
| #define CH_DBG_FILL_THREADS FALSE | |||
| /** | |||
| * @brief Debug option, threads profiling. | |||
| * @details If enabled then a field is added to the @p thread_t structure that | |||
| * counts the system ticks occurred while executing the thread. | |||
| * | |||
| * @note The default is @p FALSE. | |||
| * @note This debug option is not currently compatible with the | |||
| * tickless mode. | |||
| */ | |||
| #define CH_DBG_THREADS_PROFILING FALSE | |||
| /** @} */ | |||
| /*===========================================================================*/ | |||
| /** | |||
| * @name Kernel hooks | |||
| * @{ | |||
| */ | |||
| /*===========================================================================*/ | |||
| /** | |||
| * @brief Threads descriptor structure extension. | |||
| * @details User fields added to the end of the @p thread_t structure. | |||
| */ | |||
| #define CH_CFG_THREAD_EXTRA_FIELDS \ | |||
| /* Add threads custom fields here.*/ | |||
| /** | |||
| * @brief Threads initialization hook. | |||
| * @details User initialization code added to the @p chThdInit() API. | |||
| * | |||
| * @note It is invoked from within @p chThdInit() and implicitly from all | |||
| * the threads creation APIs. | |||
| */ | |||
| #define CH_CFG_THREAD_INIT_HOOK(tp) { \ | |||
| /* Add threads initialization code here.*/ \ | |||
| } | |||
| /** | |||
| * @brief Threads finalization hook. | |||
| * @details User finalization code added to the @p chThdExit() API. | |||
| */ | |||
| #define CH_CFG_THREAD_EXIT_HOOK(tp) { \ | |||
| /* Add threads finalization code here.*/ \ | |||
| } | |||
| /** | |||
| * @brief Context switch hook. | |||
| * @details This hook is invoked just before switching between threads. | |||
| */ | |||
| #define CH_CFG_CONTEXT_SWITCH_HOOK(ntp, otp) { \ | |||
| /* Context switch code here.*/ \ | |||
| } | |||
| /** | |||
| * @brief ISR enter hook. | |||
| */ | |||
| #define CH_CFG_IRQ_PROLOGUE_HOOK() { \ | |||
| /* IRQ prologue code here.*/ \ | |||
| } | |||
| /** | |||
| * @brief ISR exit hook. | |||
| */ | |||
| #define CH_CFG_IRQ_EPILOGUE_HOOK() { \ | |||
| /* IRQ epilogue code here.*/ \ | |||
| } | |||
| /** | |||
| * @brief Idle thread enter hook. | |||
| * @note This hook is invoked within a critical zone, no OS functions | |||
| * should be invoked from here. | |||
| * @note This macro can be used to activate a power saving mode. | |||
| */ | |||
| #define CH_CFG_IDLE_ENTER_HOOK() { \ | |||
| /* Idle-enter code here.*/ \ | |||
| } | |||
| /** | |||
| * @brief Idle thread leave hook. | |||
| * @note This hook is invoked within a critical zone, no OS functions | |||
| * should be invoked from here. | |||
| * @note This macro can be used to deactivate a power saving mode. | |||
| */ | |||
| #define CH_CFG_IDLE_LEAVE_HOOK() { \ | |||
| /* Idle-leave code here.*/ \ | |||
| } | |||
| /** | |||
| * @brief Idle Loop hook. | |||
| * @details This hook is continuously invoked by the idle thread loop. | |||
| */ | |||
| #define CH_CFG_IDLE_LOOP_HOOK() { \ | |||
| /* Idle loop code here.*/ \ | |||
| } | |||
| /** | |||
| * @brief System tick event hook. | |||
| * @details This hook is invoked in the system tick handler immediately | |||
| * after processing the virtual timers queue. | |||
| */ | |||
| #define CH_CFG_SYSTEM_TICK_HOOK() { \ | |||
| /* System tick event code here.*/ \ | |||
| } | |||
| /** | |||
| * @brief System halt hook. | |||
| * @details This hook is invoked in case to a system halting error before | |||
| * the system is halted. | |||
| */ | |||
| #define CH_CFG_SYSTEM_HALT_HOOK(reason) { \ | |||
| /* System halt code here.*/ \ | |||
| } | |||
| /** | |||
| * @brief Trace hook. | |||
| * @details This hook is invoked each time a new record is written in the | |||
| * trace buffer. | |||
| */ | |||
| #define CH_CFG_TRACE_HOOK(tep) { \ | |||
| /* Trace code here.*/ \ | |||
| } | |||
| /** @} */ | |||
| /*===========================================================================*/ | |||
| /* Port-specific settings (override port settings defaulted in chcore.h). */ | |||
| /*===========================================================================*/ | |||
| #endif /* CHCONF_H */ | |||
| /** @} */ | |||
+ 74
- 0
keyboard/stm32_f103_planck/config.h
Просмотреть файл
| @@ -0,0 +1,74 @@ | |||
| /* | |||
| Copyright 2015 Jun Wako <[email protected]> | |||
| This program is free software: you can redistribute it and/or modify | |||
| it under the terms of the GNU General Public License as published by | |||
| the Free Software Foundation, either version 2 of the License, or | |||
| (at your option) any later version. | |||
| This program is distributed in the hope that it will be useful, | |||
| but WITHOUT ANY WARRANTY; without even the implied warranty of | |||
| MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the | |||
| GNU General Public License for more details. | |||
| You should have received a copy of the GNU General Public License | |||
| along with this program. If not, see <http://www.gnu.org/licenses/>. | |||
| */ | |||
| #ifndef CONFIG_H | |||
| #define CONFIG_H | |||
| /* USB Device descriptor parameter */ | |||
| #define VENDOR_ID 0xFEED | |||
| #define PRODUCT_ID 0x6464 | |||
| #define DEVICE_VER 0x0001 | |||
| /* in python2: list(u"whatever".encode('utf-16-le')) */ | |||
| /* at most 32 characters or the ugly hack in usb_main.c borks */ | |||
| #define MANUFACTURER "TMK" | |||
| #define USBSTR_MANUFACTURER 'T', '\x00', 'M', '\x00', 'K', '\x00', ' ', '\x00', '\xc6', '\x00' | |||
| #define PRODUCT "ChibiOS TMK test" | |||
| #define USBSTR_PRODUCT 'C', '\x00', 'h', '\x00', 'i', '\x00', 'b', '\x00', 'i', '\x00', 'O', '\x00', 'S', '\x00', ' ', '\x00', 'T', '\x00', 'M', '\x00', 'K', '\x00', ' ', '\x00', 't', '\x00', 'e', '\x00', 's', '\x00', 't', '\x00' | |||
| #define DESCRIPTION "TMK keyboard firmware over ChibiOS" | |||
| /* key matrix size */ | |||
| #define MATRIX_ROWS 4 | |||
| #define MATRIX_COLS 12 | |||
| /* define if matrix has ghost */ | |||
| //#define MATRIX_HAS_GHOST | |||
| /* Set 0 if debouncing isn't needed */ | |||
| #define DEBOUNCE 5 | |||
| /* Mechanical locking support. Use KC_LCAP, KC_LNUM or KC_LSCR instead in keymap */ | |||
| #define LOCKING_SUPPORT_ENABLE | |||
| /* Locking resynchronize hack */ | |||
| #define LOCKING_RESYNC_ENABLE | |||
| /* key combination for command */ | |||
| #define IS_COMMAND() ( \ | |||
| keyboard_report->mods == (MOD_BIT(KC_LSHIFT) | MOD_BIT(KC_RSHIFT)) \ | |||
| ) | |||
| /* | |||
| * Feature disable options | |||
| * These options are also useful to firmware size reduction. | |||
| */ | |||
| /* disable debug print */ | |||
| //#define NO_DEBUG | |||
| /* disable print */ | |||
| //#define NO_PRINT | |||
| /* disable action features */ | |||
| //#define NO_ACTION_LAYER | |||
| //#define NO_ACTION_TAPPING | |||
| //#define NO_ACTION_ONESHOT | |||
| //#define NO_ACTION_MACRO | |||
| //#define NO_ACTION_FUNCTION | |||
| #endif | |||
+ 2
- 0
keyboard/stm32_f103_planck/flash.sh
Просмотреть файл
| @@ -0,0 +1,2 @@ | |||
| #!/bin/bash | |||
| Arduino_STM32_usb_hid/tools/linux/maple_upload ttyACM0 2 1EAF:0003 build/ch.bin | |||
+ 353
- 0
keyboard/stm32_f103_planck/halconf.h
Просмотреть файл
| @@ -0,0 +1,353 @@ | |||
| /* | |||
| ChibiOS - Copyright (C) 2006..2015 Giovanni Di Sirio | |||
| Licensed under the Apache License, Version 2.0 (the "License"); | |||
| you may not use this file except in compliance with the License. | |||
| You may obtain a copy of the License at | |||
| http://www.apache.org/licenses/LICENSE-2.0 | |||
| Unless required by applicable law or agreed to in writing, software | |||
| distributed under the License is distributed on an "AS IS" BASIS, | |||
| WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. | |||
| See the License for the specific language governing permissions and | |||
| limitations under the License. | |||
| */ | |||
| /** | |||
| * @file templates/halconf.h | |||
| * @brief HAL configuration header. | |||
| * @details HAL configuration file, this file allows to enable or disable the | |||
| * various device drivers from your application. You may also use | |||
| * this file in order to override the device drivers default settings. | |||
| * | |||
| * @addtogroup HAL_CONF | |||
| * @{ | |||
| */ | |||
| #ifndef _HALCONF_H_ | |||
| #define _HALCONF_H_ | |||
| #include "mcuconf.h" | |||
| /** | |||
| * @brief Enables the PAL subsystem. | |||
| */ | |||
| #if !defined(HAL_USE_PAL) || defined(__DOXYGEN__) | |||
| #define HAL_USE_PAL TRUE | |||
| #endif | |||
| /** | |||
| * @brief Enables the ADC subsystem. | |||
| */ | |||
| #if !defined(HAL_USE_ADC) || defined(__DOXYGEN__) | |||
| #define HAL_USE_ADC FALSE | |||
| #endif | |||
| /** | |||
| * @brief Enables the CAN subsystem. | |||
| */ | |||
| #if !defined(HAL_USE_CAN) || defined(__DOXYGEN__) | |||
| #define HAL_USE_CAN FALSE | |||
| #endif | |||
| /** | |||
| * @brief Enables the DAC subsystem. | |||
| */ | |||
| #if !defined(HAL_USE_DAC) || defined(__DOXYGEN__) | |||
| #define HAL_USE_DAC FALSE | |||
| #endif | |||
| /** | |||
| * @brief Enables the EXT subsystem. | |||
| */ | |||
| #if !defined(HAL_USE_EXT) || defined(__DOXYGEN__) | |||
| #define HAL_USE_EXT FALSE | |||
| #endif | |||
| /** | |||
| * @brief Enables the GPT subsystem. | |||
| */ | |||
| #if !defined(HAL_USE_GPT) || defined(__DOXYGEN__) | |||
| #define HAL_USE_GPT FALSE | |||
| #endif | |||
| /** | |||
| * @brief Enables the I2C subsystem. | |||
| */ | |||
| #if !defined(HAL_USE_I2C) || defined(__DOXYGEN__) | |||
| #define HAL_USE_I2C FALSE | |||
| #endif | |||
| /** | |||
| * @brief Enables the I2S subsystem. | |||
| */ | |||
| #if !defined(HAL_USE_I2S) || defined(__DOXYGEN__) | |||
| #define HAL_USE_I2S FALSE | |||
| #endif | |||
| /** | |||
| * @brief Enables the ICU subsystem. | |||
| */ | |||
| #if !defined(HAL_USE_ICU) || defined(__DOXYGEN__) | |||
| #define HAL_USE_ICU FALSE | |||
| #endif | |||
| /** | |||
| * @brief Enables the MAC subsystem. | |||
| */ | |||
| #if !defined(HAL_USE_MAC) || defined(__DOXYGEN__) | |||
| #define HAL_USE_MAC FALSE | |||
| #endif | |||
| /** | |||
| * @brief Enables the MMC_SPI subsystem. | |||
| */ | |||
| #if !defined(HAL_USE_MMC_SPI) || defined(__DOXYGEN__) | |||
| #define HAL_USE_MMC_SPI FALSE | |||
| #endif | |||
| /** | |||
| * @brief Enables the PWM subsystem. | |||
| */ | |||
| #if !defined(HAL_USE_PWM) || defined(__DOXYGEN__) | |||
| #define HAL_USE_PWM FALSE | |||
| #endif | |||
| /** | |||
| * @brief Enables the RTC subsystem. | |||
| */ | |||
| #if !defined(HAL_USE_RTC) || defined(__DOXYGEN__) | |||
| #define HAL_USE_RTC FALSE | |||
| #endif | |||
| /** | |||
| * @brief Enables the SDC subsystem. | |||
| */ | |||
| #if !defined(HAL_USE_SDC) || defined(__DOXYGEN__) | |||
| #define HAL_USE_SDC FALSE | |||
| #endif | |||
| /** | |||
| * @brief Enables the SERIAL subsystem. | |||
| */ | |||
| #if !defined(HAL_USE_SERIAL) || defined(__DOXYGEN__) | |||
| #define HAL_USE_SERIAL FALSE | |||
| #endif | |||
| /** | |||
| * @brief Enables the SERIAL over USB subsystem. | |||
| */ | |||
| #if !defined(HAL_USE_SERIAL_USB) || defined(__DOXYGEN__) | |||
| #define HAL_USE_SERIAL_USB FALSE | |||
| #endif | |||
| /** | |||
| * @brief Enables the SPI subsystem. | |||
| */ | |||
| #if !defined(HAL_USE_SPI) || defined(__DOXYGEN__) | |||
| #define HAL_USE_SPI FALSE | |||
| #endif | |||
| /** | |||
| * @brief Enables the UART subsystem. | |||
| */ | |||
| #if !defined(HAL_USE_UART) || defined(__DOXYGEN__) | |||
| #define HAL_USE_UART FALSE | |||
| #endif | |||
| /** | |||
| * @brief Enables the USB subsystem. | |||
| */ | |||
| #if !defined(HAL_USE_USB) || defined(__DOXYGEN__) | |||
| #define HAL_USE_USB TRUE | |||
| #endif | |||
| /** | |||
| * @brief Enables the WDG subsystem. | |||
| */ | |||
| #if !defined(HAL_USE_WDG) || defined(__DOXYGEN__) | |||
| #define HAL_USE_WDG FALSE | |||
| #endif | |||
| /*===========================================================================*/ | |||
| /* ADC driver related settings. */ | |||
| /*===========================================================================*/ | |||
| /** | |||
| * @brief Enables synchronous APIs. | |||
| * @note Disabling this option saves both code and data space. | |||
| */ | |||
| #if !defined(ADC_USE_WAIT) || defined(__DOXYGEN__) | |||
| #define ADC_USE_WAIT TRUE | |||
| #endif | |||
| /** | |||
| * @brief Enables the @p adcAcquireBus() and @p adcReleaseBus() APIs. | |||
| * @note Disabling this option saves both code and data space. | |||
| */ | |||
| #if !defined(ADC_USE_MUTUAL_EXCLUSION) || defined(__DOXYGEN__) | |||
| #define ADC_USE_MUTUAL_EXCLUSION TRUE | |||
| #endif | |||
| /*===========================================================================*/ | |||
| /* CAN driver related settings. */ | |||
| /*===========================================================================*/ | |||
| /** | |||
| * @brief Sleep mode related APIs inclusion switch. | |||
| */ | |||
| #if !defined(CAN_USE_SLEEP_MODE) || defined(__DOXYGEN__) | |||
| #define CAN_USE_SLEEP_MODE TRUE | |||
| #endif | |||
| /*===========================================================================*/ | |||
| /* I2C driver related settings. */ | |||
| /*===========================================================================*/ | |||
| /** | |||
| * @brief Enables the mutual exclusion APIs on the I2C bus. | |||
| */ | |||
| #if !defined(I2C_USE_MUTUAL_EXCLUSION) || defined(__DOXYGEN__) | |||
| #define I2C_USE_MUTUAL_EXCLUSION TRUE | |||
| #endif | |||
| /*===========================================================================*/ | |||
| /* MAC driver related settings. */ | |||
| /*===========================================================================*/ | |||
| /** | |||
| * @brief Enables an event sources for incoming packets. | |||
| */ | |||
| #if !defined(MAC_USE_ZERO_COPY) || defined(__DOXYGEN__) | |||
| #define MAC_USE_ZERO_COPY FALSE | |||
| #endif | |||
| /** | |||
| * @brief Enables an event sources for incoming packets. | |||
| */ | |||
| #if !defined(MAC_USE_EVENTS) || defined(__DOXYGEN__) | |||
| #define MAC_USE_EVENTS TRUE | |||
| #endif | |||
| /*===========================================================================*/ | |||
| /* MMC_SPI driver related settings. */ | |||
| /*===========================================================================*/ | |||
| /** | |||
| * @brief Delays insertions. | |||
| * @details If enabled this options inserts delays into the MMC waiting | |||
| * routines releasing some extra CPU time for the threads with | |||
| * lower priority, this may slow down the driver a bit however. | |||
| * This option is recommended also if the SPI driver does not | |||
| * use a DMA channel and heavily loads the CPU. | |||
| */ | |||
| #if !defined(MMC_NICE_WAITING) || defined(__DOXYGEN__) | |||
| #define MMC_NICE_WAITING TRUE | |||
| #endif | |||
| /*===========================================================================*/ | |||
| /* SDC driver related settings. */ | |||
| /*===========================================================================*/ | |||
| /** | |||
| * @brief Number of initialization attempts before rejecting the card. | |||
| * @note Attempts are performed at 10mS intervals. | |||
| */ | |||
| #if !defined(SDC_INIT_RETRY) || defined(__DOXYGEN__) | |||
| #define SDC_INIT_RETRY 100 | |||
| #endif | |||
| /** | |||
| * @brief Include support for MMC cards. | |||
| * @note MMC support is not yet implemented so this option must be kept | |||
| * at @p FALSE. | |||
| */ | |||
| #if !defined(SDC_MMC_SUPPORT) || defined(__DOXYGEN__) | |||
| #define SDC_MMC_SUPPORT FALSE | |||
| #endif | |||
| /** | |||
| * @brief Delays insertions. | |||
| * @details If enabled this options inserts delays into the MMC waiting | |||
| * routines releasing some extra CPU time for the threads with | |||
| * lower priority, this may slow down the driver a bit however. | |||
| */ | |||
| #if !defined(SDC_NICE_WAITING) || defined(__DOXYGEN__) | |||
| #define SDC_NICE_WAITING TRUE | |||
| #endif | |||
| /*===========================================================================*/ | |||
| /* SERIAL driver related settings. */ | |||
| /*===========================================================================*/ | |||
| /** | |||
| * @brief Default bit rate. | |||
| * @details Configuration parameter, this is the baud rate selected for the | |||
| * default configuration. | |||
| */ | |||
| #if !defined(SERIAL_DEFAULT_BITRATE) || defined(__DOXYGEN__) | |||
| #define SERIAL_DEFAULT_BITRATE 38400 | |||
| #endif | |||
| /** | |||
| * @brief Serial buffers size. | |||
| * @details Configuration parameter, you can change the depth of the queue | |||
| * buffers depending on the requirements of your application. | |||
| * @note The default is 64 bytes for both the transmission and receive | |||
| * buffers. | |||
| */ | |||
| #if !defined(SERIAL_BUFFERS_SIZE) || defined(__DOXYGEN__) | |||
| #define SERIAL_BUFFERS_SIZE 16 | |||
| #endif | |||
| /*===========================================================================*/ | |||
| /* SERIAL_USB driver related setting. */ | |||
| /*===========================================================================*/ | |||
| /** | |||
| * @brief Serial over USB buffers size. | |||
| * @details Configuration parameter, the buffer size must be a multiple of | |||
| * the USB data endpoint maximum packet size. | |||
| * @note The default is 64 bytes for both the transmission and receive | |||
| * buffers. | |||
| */ | |||
| #if !defined(SERIAL_USB_BUFFERS_SIZE) || defined(__DOXYGEN__) | |||
| #define SERIAL_USB_BUFFERS_SIZE 256 | |||
| #endif | |||
| /*===========================================================================*/ | |||
| /* SPI driver related settings. */ | |||
| /*===========================================================================*/ | |||
| /** | |||
| * @brief Enables synchronous APIs. | |||
| * @note Disabling this option saves both code and data space. | |||
| */ | |||
| #if !defined(SPI_USE_WAIT) || defined(__DOXYGEN__) | |||
| #define SPI_USE_WAIT TRUE | |||
| #endif | |||
| /** | |||
| * @brief Enables the @p spiAcquireBus() and @p spiReleaseBus() APIs. | |||
| * @note Disabling this option saves both code and data space. | |||
| */ | |||
| #if !defined(SPI_USE_MUTUAL_EXCLUSION) || defined(__DOXYGEN__) | |||
| #define SPI_USE_MUTUAL_EXCLUSION TRUE | |||
| #endif | |||
| /*===========================================================================*/ | |||
| /* USB driver related settings. */ | |||
| /*===========================================================================*/ | |||
| /** | |||
| * @brief Enables synchronous APIs. | |||
| * @note Disabling this option saves both code and data space. | |||
| */ | |||
| #if !defined(USB_USE_WAIT) || defined(__DOXYGEN__) | |||
| #define USB_USE_WAIT TRUE | |||
| #endif | |||
| #endif /* _HALCONF_H_ */ | |||
| /** @} */ | |||
+ 30
- 0
keyboard/stm32_f103_planck/keymap_common.c
Просмотреть файл
| @@ -0,0 +1,30 @@ | |||
| /* | |||
| Copyright 2012,2013 Jun Wako <[email protected]> | |||
| This program is free software: you can redistribute it and/or modify | |||
| it under the terms of the GNU General Public License as published by | |||
| the Free Software Foundation, either version 2 of the License, or | |||
| (at your option) any later version. | |||
| This program is distributed in the hope that it will be useful, | |||
| but WITHOUT ANY WARRANTY; without even the implied warranty of | |||
| MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the | |||
| GNU General Public License for more details. | |||
| You should have received a copy of the GNU General Public License | |||
| along with this program. If not, see <http://www.gnu.org/licenses/>. | |||
| */ | |||
| #include "keymap_common.h" | |||
| /* translates key to keycode */ | |||
| uint8_t keymap_key_to_keycode(uint8_t layer, keypos_t key) | |||
| { | |||
| return pgm_read_byte(&keymaps[(layer)][(key.row)][(key.col)]); | |||
| } | |||
| /* translates Fn keycode to action */ | |||
| action_t keymap_fn_to_action(uint8_t keycode) | |||
| { | |||
| return (action_t){ .code = pgm_read_word(&fn_actions[FN_INDEX(keycode)]) }; | |||
| } | |||
+ 51
- 0
keyboard/stm32_f103_planck/keymap_common.h
Просмотреть файл
| @@ -0,0 +1,51 @@ | |||
| /* | |||
| Copyright 2012,2013 Jun Wako <[email protected]> | |||
| This program is free software: you can redistribute it and/or modify | |||
| it under the terms of the GNU General Public License as published by | |||
| the Free Software Foundation, either version 2 of the License, or | |||
| (at your option) any later version. | |||
| This program is distributed in the hope that it will be useful, | |||
| but WITHOUT ANY WARRANTY; without even the implied warranty of | |||
| MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the | |||
| GNU General Public License for more details. | |||
| You should have received a copy of the GNU General Public License | |||
| along with this program. If not, see <http://www.gnu.org/licenses/>. | |||
| */ | |||
| #ifndef KEYMAP_COMMON_H | |||
| #define KEYMAP_COMMON_H | |||
| #include <stdint.h> | |||
| #include <stdbool.h> | |||
| #include "keycode.h" | |||
| #include "action.h" | |||
| #include "action_macro.h" | |||
| #include "action_layer.h" | |||
| #include "report.h" | |||
| #include "host.h" | |||
| #include "print.h" | |||
| #include "debug.h" | |||
| #include "keymap.h" | |||
| extern const uint8_t keymaps[][MATRIX_ROWS][MATRIX_COLS]; | |||
| extern const uint16_t fn_actions[]; | |||
| /* TV44 keymap definition macro | |||
| */ | |||
| #define KEYMAP( \ | |||
| K00, K01, K02, K03, K04, K05, K06, K07, K08, K09, K0A, K0B, \ | |||
| K10, K11, K12, K13, K14, K15, K16, K17, K18, K19, K1A, K1B, \ | |||
| K20, K21, K22, K23, K24, K25, K26, K27, K28, K29, K2A, K2B, \ | |||
| K30, K31, K32, K33, K34, K35, K36, K37, K38, K39, K3A, K3B \ | |||
| ) { \ | |||
| { KC_##K00, KC_##K01, KC_##K02, KC_##K03, KC_##K04, KC_##K05, KC_##K06, KC_##K07, KC_##K08, KC_##K09, KC_##K0A, KC_##K0B }, \ | |||
| { KC_##K10, KC_##K11, KC_##K12, KC_##K13, KC_##K14, KC_##K15, KC_##K16, KC_##K17, KC_##K18, KC_##K19, KC_##K1A, KC_##K1B }, \ | |||
| { KC_##K20, KC_##K21, KC_##K22, KC_##K23, KC_##K24, KC_##K25, KC_##K26, KC_##K27, KC_##K28, KC_##K29, KC_##K2A, KC_##K2B }, \ | |||
| { KC_##K30, KC_##K31, KC_##K32, KC_##K33, KC_##K34, KC_##K35, KC_##K36, KC_##K37, KC_##K38, KC_##K39, KC_##K3A, KC_##K3B } \ | |||
| } | |||
| #endif | |||
+ 53
- 0
keyboard/stm32_f103_planck/keymap_planck.c
Просмотреть файл
| @@ -0,0 +1,53 @@ | |||
| #include "keymap_common.h" | |||
| const uint8_t PROGMEM keymaps[][MATRIX_ROWS][MATRIX_COLS] = { | |||
| /* 0: qerty */ | |||
| KEYMAP(ESC, Q, W, E, R, T, Y, U, I, O, P,BSPC, \ | |||
| FN0, A, S, D, F, G, H, J, K, L,SCLN,QUOT, \ | |||
| LSFT, Z, X, C, V, B, N, M,COMM, DOT,SLSH,FN20, \ | |||
| LCTL,LALT,LGUI, APP, FN1, SPC, SPC, FN2,LEFT,DOWN, UP,RGHT), | |||
| /* 1: FN 1 */ | |||
| KEYMAP(FN3, FN4, FN5, FN6, FN7, FN8, FN9,FN10,FN11,FN12,FN13, DEL, \ | |||
| TRNS,TRNS,TRNS,PAUS,TRNS,TRNS,TRNS,FN16,FN17,FN18,FN19,FN14, \ | |||
| TRNS, F1, F2, F3, F4, F5, F6, F7, F8, F9, F10,TRNS, \ | |||
| TRNS,TRNS,TRNS,TRNS,TRNS,TRNS,TRNS,TRNS,HOME,PGDN,PGUP, END), | |||
| /* 2: FN 2 */ | |||
| KEYMAP(GRV, 1, 2, 3, 4, 5, 6, 7, 8, 9, 0, DEL, \ | |||
| TRNS,TRNS,TRNS,TRNS,TRNS,TRNS,TRNS,MINS, EQL,LBRC,RBRC,BSLS, \ | |||
| TRNS, F11, F12, F13, F14, F15, F16, F17, F18,PGUP, F20,TRNS, \ | |||
| TRNS,TRNS,TRNS,TRNS,TRNS,TRNS,TRNS,TRNS,HOME,PGDN,PGUP, END), | |||
| /* 3: TAB */ | |||
| KEYMAP(TRNS,CALC,WHOM,MAIL,TRNS,MYCM,TRNS,TRNS,TRNS,TRNS,PSCR, DEL, \ | |||
| TRNS,TRNS,TRNS,TRNS,TRNS,TRNS,TRNS,TRNS,TRNS,TRNS,TRNS,TRNS, \ | |||
| TRNS,TRNS,TRNS,TRNS,TRNS,TRNS,TRNS,TRNS,TRNS,UP, TRNS,TRNS, \ | |||
| TRNS,TRNS,TRNS,TRNS,TRNS,TRNS,TRNS,TRNS,HOME,PGDN,PGUP, END), | |||
| }; | |||
| const uint16_t PROGMEM fn_actions[] = { | |||
| [0] = ACTION_LAYER_TAP_KEY(3, KC_TAB), | |||
| [1] = ACTION_LAYER_TAP_KEY(1, KC_SPC), | |||
| [2] = ACTION_LAYER_TAP_KEY(2, KC_SPC), | |||
| [3] = ACTION_MODS_KEY(MOD_LSFT, KC_GRV), | |||
| [4] = ACTION_MODS_KEY(MOD_LSFT, KC_1), | |||
| [5] = ACTION_MODS_KEY(MOD_LSFT, KC_2), | |||
| [6] = ACTION_MODS_KEY(MOD_LSFT, KC_3), | |||
| [7] = ACTION_MODS_KEY(MOD_LSFT, KC_4), | |||
| [8] = ACTION_MODS_KEY(MOD_LSFT, KC_5), | |||
| [9] = ACTION_MODS_KEY(MOD_LSFT, KC_6), | |||
| [10] = ACTION_MODS_KEY(MOD_LSFT, KC_7), | |||
| [11] = ACTION_MODS_KEY(MOD_LSFT, KC_8), | |||
| [12] = ACTION_MODS_KEY(MOD_LSFT, KC_9), | |||
| [13] = ACTION_MODS_KEY(MOD_LSFT, KC_0), | |||
| [14] = ACTION_MODS_KEY(MOD_LSFT, KC_BSLS), | |||
| [15] = ACTION_MODS_KEY(MOD_LSFT, KC_QUOT), | |||
| [16] = ACTION_MODS_KEY(MOD_LSFT, KC_MINS), | |||
| [17] = ACTION_MODS_KEY(MOD_LSFT, KC_EQL), | |||
| [18] = ACTION_MODS_KEY(MOD_LSFT, KC_LBRC), | |||
| [19] = ACTION_MODS_KEY(MOD_LSFT, KC_RBRC), | |||
| [20] = ACTION_MODS_TAP_KEY(MOD_RSFT, KC_ENT), | |||
| }; | |||
+ 88
- 0
keyboard/stm32_f103_planck/ld/STM32F103x8_stm32duino_bootloader.ld
Просмотреть файл
| @@ -0,0 +1,88 @@ | |||
| /* | |||
| ChibiOS - Copyright (C) 2006..2016 Giovanni Di Sirio | |||
| Licensed under the Apache License, Version 2.0 (the "License"); | |||
| you may not use this file except in compliance with the License. | |||
| You may obtain a copy of the License at | |||
| http://www.apache.org/licenses/LICENSE-2.0 | |||
| Unless required by applicable law or agreed to in writing, software | |||
| distributed under the License is distributed on an "AS IS" BASIS, | |||
| WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. | |||
| See the License for the specific language governing permissions and | |||
| limitations under the License. | |||
| */ | |||
| /* | |||
| * ST32F103xB memory setup for use with the maplemini bootloader. | |||
| * You will have to | |||
| * #define CORTEX_VTOR_INIT 0x5000 | |||
| * in your projects chconf.h | |||
| */ | |||
| MEMORY | |||
| { | |||
| flash0 : org = 0x08002000, len = 128k - 0x2000 | |||
| flash1 : org = 0x00000000, len = 0 | |||
| flash2 : org = 0x00000000, len = 0 | |||
| flash3 : org = 0x00000000, len = 0 | |||
| flash4 : org = 0x00000000, len = 0 | |||
| flash5 : org = 0x00000000, len = 0 | |||
| flash6 : org = 0x00000000, len = 0 | |||
| flash7 : org = 0x00000000, len = 0 | |||
| ram0 : org = 0x20000000, len = 20k | |||
| ram1 : org = 0x00000000, len = 0 | |||
| ram2 : org = 0x00000000, len = 0 | |||
| ram3 : org = 0x00000000, len = 0 | |||
| ram4 : org = 0x00000000, len = 0 | |||
| ram5 : org = 0x00000000, len = 0 | |||
| ram6 : org = 0x00000000, len = 0 | |||
| ram7 : org = 0x00000000, len = 0 | |||
| } | |||
| /* For each data/text section two region are defined, a virtual region | |||
| and a load region (_LMA suffix).*/ | |||
| /* Flash region to be used for exception vectors.*/ | |||
| REGION_ALIAS("VECTORS_FLASH", flash0); | |||
| REGION_ALIAS("VECTORS_FLASH_LMA", flash0); | |||
| /* Flash region to be used for constructors and destructors.*/ | |||
| REGION_ALIAS("XTORS_FLASH", flash0); | |||
| REGION_ALIAS("XTORS_FLASH_LMA", flash0); | |||
| /* Flash region to be used for code text.*/ | |||
| REGION_ALIAS("TEXT_FLASH", flash0); | |||
| REGION_ALIAS("TEXT_FLASH_LMA", flash0); | |||
| /* Flash region to be used for read only data.*/ | |||
| REGION_ALIAS("RODATA_FLASH", flash0); | |||
| REGION_ALIAS("RODATA_FLASH_LMA", flash0); | |||
| /* Flash region to be used for various.*/ | |||
| REGION_ALIAS("VARIOUS_FLASH", flash0); | |||
| REGION_ALIAS("VARIOUS_FLASH_LMA", flash0); | |||
| /* Flash region to be used for RAM(n) initialization data.*/ | |||
| REGION_ALIAS("RAM_INIT_FLASH_LMA", flash0); | |||
| /* RAM region to be used for Main stack. This stack accommodates the processing | |||
| of all exceptions and interrupts.*/ | |||
| REGION_ALIAS("MAIN_STACK_RAM", ram0); | |||
| /* RAM region to be used for the process stack. This is the stack used by | |||
| the main() function.*/ | |||
| REGION_ALIAS("PROCESS_STACK_RAM", ram0); | |||
| /* RAM region to be used for data segment.*/ | |||
| REGION_ALIAS("DATA_RAM", ram0); | |||
| REGION_ALIAS("DATA_RAM_LMA", flash0); | |||
| /* RAM region to be used for BSS segment.*/ | |||
| REGION_ALIAS("BSS_RAM", ram0); | |||
| /* RAM region to be used for the default heap.*/ | |||
| REGION_ALIAS("HEAP_RAM", ram0); | |||
| /* Generic rules inclusion.*/ | |||
| INCLUDE rules.ld | |||
+ 43
- 0
keyboard/stm32_f103_planck/led.c
Просмотреть файл
| @@ -0,0 +1,43 @@ | |||
| /* | |||
| Copyright 2012 Jun Wako <[email protected]> | |||
| This program is free software: you can redistribute it and/or modify | |||
| it under the terms of the GNU General Public License as published by | |||
| the Free Software Foundation, either version 2 of the License, or | |||
| (at your option) any later version. | |||
| This program is distributed in the hope that it will be useful, | |||
| but WITHOUT ANY WARRANTY; without even the implied warranty of | |||
| MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the | |||
| GNU General Public License for more details. | |||
| You should have received a copy of the GNU General Public License | |||
| along with this program. If not, see <http://www.gnu.org/licenses/>. | |||
| */ | |||
| #include "hal.h" | |||
| #include "led.h" | |||
| void led_set(uint8_t usb_led) | |||
| { | |||
| if (usb_led & (1<<USB_LED_CAPS_LOCK)) { | |||
| /* generic STM32F103C8T6 board */ | |||
| #ifdef BOARD_GENERIC_STM32_F103 | |||
| palClearPad(GPIOC, 13); | |||
| #endif | |||
| /* Maple Mini */ | |||
| #ifdef BOARD_MAPLEMINI_STM32_F103 | |||
| palSetPad(GPIOB, 1); | |||
| #endif | |||
| } else { | |||
| /* generic STM32F103C8T6 board */ | |||
| #ifdef BOARD_GENERIC_STM32_F103 | |||
| palSetPad(GPIOC, 13); | |||
| #endif | |||
| /* Maple Mini */ | |||
| #ifdef BOARD_MAPLEMINI_STM32_F103 | |||
| palClearPad(GPIOB,1); | |||
| #endif | |||
| } | |||
| } | |||
+ 208
- 0
keyboard/stm32_f103_planck/matrix.c
Просмотреть файл
| @@ -0,0 +1,208 @@ | |||
| /* | |||
| Copyright 2012 Jun Wako <[email protected]> | |||
| This program is free software: you can redistribute it and/or modify | |||
| it under the terms of the GNU General Public License as published by | |||
| the Free Software Foundation, either version 2 of the License, or | |||
| (at your option) any later version. | |||
| This program is distributed in the hope that it will be useful, | |||
| but WITHOUT ANY WARRANTY; without even the implied warranty of | |||
| MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the | |||
| GNU General Public License for more details. | |||
| You should have received a copy of the GNU General Public License | |||
| along with this program. If not, see <http://www.gnu.org/licenses/>. | |||
| */ | |||
| #include "ch.h" | |||
| #include "hal.h" | |||
| /* | |||
| * scan matrix | |||
| */ | |||
| #include "print.h" | |||
| #include "debug.h" | |||
| #include "util.h" | |||
| #include "matrix.h" | |||
| #include "wait.h" | |||
| #ifndef DEBOUNCE | |||
| # define DEBOUNCE 5 | |||
| #endif | |||
| static uint8_t debouncing = DEBOUNCE; | |||
| /* matrix state(1:on, 0:off) */ | |||
| static matrix_row_t matrix[MATRIX_ROWS]; | |||
| static matrix_row_t matrix_debouncing[MATRIX_ROWS]; | |||
| static matrix_row_t read_cols(void); | |||
| static void init_cols(void); | |||
| static void unselect_rows(void); | |||
| static void select_row(uint8_t row); | |||
| inline | |||
| uint8_t matrix_rows(void) | |||
| { | |||
| return MATRIX_ROWS; | |||
| } | |||
| inline | |||
| uint8_t matrix_cols(void) | |||
| { | |||
| return MATRIX_COLS; | |||
| } | |||
| /* generic STM32F103C8T6 board */ | |||
| #ifdef BOARD_GENERIC_STM32_F103 | |||
| #define LED_ON() do { palClearPad(GPIOC, GPIOC_LED) ;} while (0) | |||
| #define LED_OFF() do { palSetPad(GPIOC, GPIOC_LED); } while (0) | |||
| #define LED_TGL() do { palTogglePad(GPIOC, GPIOC_LED); } while (0) | |||
| #endif | |||
| /* Maple Mini */ | |||
| #ifdef BOARD_MAPLEMINI_STM32_F103 | |||
| #define LED_ON() do { palSetPad(GPIOB, 1) ;} while (0) | |||
| #define LED_OFF() do { palClearPad(GPIOB, 1); } while (0) | |||
| #define LED_TGL() do { palTogglePad(GPIOB, 1); } while (0) | |||
| #endif | |||
| void matrix_init(void) | |||
| { | |||
| // initialize row and col | |||
| unselect_rows(); | |||
| init_cols(); | |||
| // initialize matrix state: all keys off | |||
| for (uint8_t i=0; i < MATRIX_ROWS; i++) { | |||
| matrix[i] = 0; | |||
| matrix_debouncing[i] = 0; | |||
| } | |||
| //debug | |||
| debug_matrix = true; | |||
| LED_ON(); | |||
| wait_ms(500); | |||
| LED_OFF(); | |||
| } | |||
| uint8_t matrix_scan(void) | |||
| { | |||
| for (uint8_t i = 0; i < MATRIX_ROWS; i++) { | |||
| select_row(i); | |||
| wait_us(30); // without this wait read unstable value. | |||
| matrix_row_t cols = read_cols(); | |||
| if (matrix_debouncing[i] != cols) { | |||
| matrix_debouncing[i] = cols; | |||
| if (debouncing) { | |||
| debug("bounce!: "); debug_hex(debouncing); debug("\n"); | |||
| } | |||
| debouncing = DEBOUNCE; | |||
| } | |||
| unselect_rows(); | |||
| } | |||
| if (debouncing) { | |||
| if (--debouncing) { | |||
| wait_ms(1); | |||
| } else { | |||
| for (uint8_t i = 0; i < MATRIX_ROWS; i++) { | |||
| matrix[i] = matrix_debouncing[i]; | |||
| } | |||
| } | |||
| } | |||
| return 1; | |||
| } | |||
| inline | |||
| bool matrix_is_on(uint8_t row, uint8_t col) | |||
| { | |||
| return (matrix[row] & ((matrix_row_t)1<<col)); | |||
| } | |||
| inline | |||
| matrix_row_t matrix_get_row(uint8_t row) | |||
| { | |||
| return matrix[row]; | |||
| } | |||
| void matrix_print(void) | |||
| { | |||
| print("\nr/c 0123456789ABCDEF\n"); | |||
| for (uint8_t row = 0; row < MATRIX_ROWS; row++) { | |||
| phex(row); print(": "); | |||
| pbin_reverse16(matrix_get_row(row)); | |||
| print("\n"); | |||
| } | |||
| } | |||
| /* Column pin configuration | |||
| */ | |||
| static void init_cols(void) | |||
| { | |||
| palSetPadMode(GPIOC, 14, PAL_MODE_INPUT_PULLUP); | |||
| palSetPadMode(GPIOC, 15, PAL_MODE_INPUT_PULLUP); | |||
| palSetPadMode(GPIOA, 0, PAL_MODE_INPUT_PULLUP); | |||
| palSetPadMode(GPIOA, 1, PAL_MODE_INPUT_PULLUP); | |||
| palSetPadMode(GPIOA, 2, PAL_MODE_INPUT_PULLUP); | |||
| palSetPadMode(GPIOA, 3, PAL_MODE_INPUT_PULLUP); | |||
| palSetPadMode(GPIOA, 4, PAL_MODE_INPUT_PULLUP); | |||
| palSetPadMode(GPIOA, 5, PAL_MODE_INPUT_PULLUP); | |||
| palSetPadMode(GPIOA, 6, PAL_MODE_INPUT_PULLUP); | |||
| palSetPadMode(GPIOA, 7, PAL_MODE_INPUT_PULLUP); | |||
| palSetPadMode(GPIOB, 0, PAL_MODE_INPUT_PULLUP); | |||
| palSetPadMode(GPIOB, 1, PAL_MODE_INPUT_PULLUP); | |||
| } | |||
| /* Returns status of switches(1:on, 0:off) */ | |||
| static matrix_row_t read_cols(void) | |||
| { | |||
| return ((palReadPad(GPIOC, 14)==PAL_HIGH) ? 0 : (1<<0)) | |||
| | ((palReadPad(GPIOC, 15)==PAL_HIGH) ? 0 : (1<<1)) | |||
| | ((palReadPad(GPIOA, 0)==PAL_HIGH) ? 0 : (1<<2)) | |||
| | ((palReadPad(GPIOA, 1)==PAL_HIGH) ? 0 : (1<<3)) | |||
| | ((palReadPad(GPIOA, 2)==PAL_HIGH) ? 0 : (1<<4)) | |||
| | ((palReadPad(GPIOA, 3)==PAL_HIGH) ? 0 : (1<<5)) | |||
| | ((palReadPad(GPIOA, 4)==PAL_HIGH) ? 0 : (1<<6)) | |||
| | ((palReadPad(GPIOA, 5)==PAL_HIGH) ? 0 : (1<<7)) | |||
| | ((palReadPad(GPIOA, 6)==PAL_HIGH) ? 0 : (1<<8)) | |||
| | ((palReadPad(GPIOA, 7)==PAL_HIGH) ? 0 : (1<<9)) | |||
| | ((palReadPad(GPIOB, 0)==PAL_HIGH) ? 0 : (1<<10)) | |||
| | ((palReadPad(GPIOB, 1)==PAL_HIGH) ? 0 : (1<<11)); | |||
| } | |||
| /* Row pin configuration | |||
| */ | |||
| static void unselect_rows(void) | |||
| { | |||
| palSetPadMode(GPIOB, 13, PAL_MODE_INPUT); // hi-Z | |||
| palSetPadMode(GPIOB, 14, PAL_MODE_INPUT); // hi-Z | |||
| palSetPadMode(GPIOB, 15, PAL_MODE_INPUT); // hi-Z | |||
| palSetPadMode(GPIOA, 8, PAL_MODE_INPUT); // hi-Z | |||
| } | |||
| static void select_row(uint8_t row) | |||
| { | |||
| (void)row; | |||
| // Output low to select | |||
| switch (row) { | |||
| case 0: | |||
| palSetPadMode(GPIOB, 13, PAL_MODE_OUTPUT_PUSHPULL); | |||
| palClearPad(GPIOB, 13); | |||
| break; | |||
| case 1: | |||
| palSetPadMode(GPIOB, 14, PAL_MODE_OUTPUT_PUSHPULL); | |||
| palClearPad(GPIOB, 14); | |||
| break; | |||
| case 2: | |||
| palSetPadMode(GPIOB, 15, PAL_MODE_OUTPUT_PUSHPULL); | |||
| palClearPad(GPIOB, 15); | |||
| break; | |||
| case 3: | |||
| palSetPadMode(GPIOA, 8, PAL_MODE_OUTPUT_PUSHPULL); | |||
| palClearPad(GPIOA, 8); | |||
| break; | |||
| } | |||
| } | |||
+ 209
- 0
keyboard/stm32_f103_planck/mcuconf.h
Просмотреть файл
| @@ -0,0 +1,209 @@ | |||
| /* | |||
| ChibiOS - Copyright (C) 2006..2015 Giovanni Di Sirio | |||
| Licensed under the Apache License, Version 2.0 (the "License"); | |||
| you may not use this file except in compliance with the License. | |||
| You may obtain a copy of the License at | |||
| http://www.apache.org/licenses/LICENSE-2.0 | |||
| Unless required by applicable law or agreed to in writing, software | |||
| distributed under the License is distributed on an "AS IS" BASIS, | |||
| WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. | |||
| See the License for the specific language governing permissions and | |||
| limitations under the License. | |||
| */ | |||
| #ifndef _MCUCONF_H_ | |||
| #define _MCUCONF_H_ | |||
| #define STM32F103_MCUCONF | |||
| /* | |||
| * STM32F103 drivers configuration. | |||
| * The following settings override the default settings present in | |||
| * the various device driver implementation headers. | |||
| * Note that the settings for each driver only have effect if the whole | |||
| * driver is enabled in halconf.h. | |||
| * | |||
| * IRQ priorities: | |||
| * 15...0 Lowest...Highest. | |||
| * | |||
| * DMA priorities: | |||
| * 0...3 Lowest...Highest. | |||
| */ | |||
| /* | |||
| * HAL driver system settings. | |||
| */ | |||
| #define STM32_NO_INIT FALSE | |||
| #define STM32_HSI_ENABLED TRUE | |||
| #define STM32_LSI_ENABLED FALSE | |||
| #define STM32_HSE_ENABLED TRUE | |||
| #define STM32_LSE_ENABLED FALSE | |||
| #define STM32_SW STM32_SW_PLL | |||
| #define STM32_PLLSRC STM32_PLLSRC_HSE | |||
| #define STM32_PLLXTPRE STM32_PLLXTPRE_DIV1 | |||
| #define STM32_PLLMUL_VALUE 9 | |||
| #define STM32_HPRE STM32_HPRE_DIV1 | |||
| #define STM32_PPRE1 STM32_PPRE1_DIV2 | |||
| #define STM32_PPRE2 STM32_PPRE2_DIV2 | |||
| #define STM32_ADCPRE STM32_ADCPRE_DIV4 | |||
| #define STM32_USB_CLOCK_REQUIRED TRUE | |||
| #define STM32_USBPRE STM32_USBPRE_DIV1P5 | |||
| #define STM32_MCOSEL STM32_MCOSEL_NOCLOCK | |||
| #define STM32_RTCSEL STM32_RTCSEL_HSEDIV | |||
| #define STM32_PVD_ENABLE FALSE | |||
| #define STM32_PLS STM32_PLS_LEV0 | |||
| /* | |||
| * ADC driver system settings. | |||
| */ | |||
| #define STM32_ADC_USE_ADC1 FALSE | |||
| #define STM32_ADC_ADC1_DMA_PRIORITY 2 | |||
| #define STM32_ADC_ADC1_IRQ_PRIORITY 6 | |||
| /* | |||
| * CAN driver system settings. | |||
| */ | |||
| #define STM32_CAN_USE_CAN1 FALSE | |||
| #define STM32_CAN_CAN1_IRQ_PRIORITY 11 | |||
| /* | |||
| * EXT driver system settings. | |||
| */ | |||
| #define STM32_EXT_EXTI0_IRQ_PRIORITY 6 | |||
| #define STM32_EXT_EXTI1_IRQ_PRIORITY 6 | |||
| #define STM32_EXT_EXTI2_IRQ_PRIORITY 6 | |||
| #define STM32_EXT_EXTI3_IRQ_PRIORITY 6 | |||
| #define STM32_EXT_EXTI4_IRQ_PRIORITY 6 | |||
| #define STM32_EXT_EXTI5_9_IRQ_PRIORITY 6 | |||
| #define STM32_EXT_EXTI10_15_IRQ_PRIORITY 6 | |||
| #define STM32_EXT_EXTI16_IRQ_PRIORITY 6 | |||
| #define STM32_EXT_EXTI17_IRQ_PRIORITY 6 | |||
| #define STM32_EXT_EXTI18_IRQ_PRIORITY 6 | |||
| #define STM32_EXT_EXTI19_IRQ_PRIORITY 6 | |||
| /* | |||
| * GPT driver system settings. | |||
| */ | |||
| #define STM32_GPT_USE_TIM1 FALSE | |||
| #define STM32_GPT_USE_TIM2 FALSE | |||
| #define STM32_GPT_USE_TIM3 FALSE | |||
| #define STM32_GPT_USE_TIM4 FALSE | |||
| #define STM32_GPT_USE_TIM5 FALSE | |||
| #define STM32_GPT_USE_TIM8 FALSE | |||
| #define STM32_GPT_TIM1_IRQ_PRIORITY 7 | |||
| #define STM32_GPT_TIM2_IRQ_PRIORITY 7 | |||
| #define STM32_GPT_TIM3_IRQ_PRIORITY 7 | |||
| #define STM32_GPT_TIM4_IRQ_PRIORITY 7 | |||
| #define STM32_GPT_TIM5_IRQ_PRIORITY 7 | |||
| #define STM32_GPT_TIM8_IRQ_PRIORITY 7 | |||
| /* | |||
| * I2C driver system settings. | |||
| */ | |||
| #define STM32_I2C_USE_I2C1 FALSE | |||
| #define STM32_I2C_USE_I2C2 FALSE | |||
| #define STM32_I2C_BUSY_TIMEOUT 50 | |||
| #define STM32_I2C_I2C1_IRQ_PRIORITY 5 | |||
| #define STM32_I2C_I2C2_IRQ_PRIORITY 5 | |||
| #define STM32_I2C_I2C1_DMA_PRIORITY 3 | |||
| #define STM32_I2C_I2C2_DMA_PRIORITY 3 | |||
| #define STM32_I2C_DMA_ERROR_HOOK(i2cp) osalSysHalt("DMA failure") | |||
| /* | |||
| * ICU driver system settings. | |||
| */ | |||
| #define STM32_ICU_USE_TIM1 FALSE | |||
| #define STM32_ICU_USE_TIM2 FALSE | |||
| #define STM32_ICU_USE_TIM3 FALSE | |||
| #define STM32_ICU_USE_TIM4 FALSE | |||
| #define STM32_ICU_USE_TIM5 FALSE | |||
| #define STM32_ICU_USE_TIM8 FALSE | |||
| #define STM32_ICU_TIM1_IRQ_PRIORITY 7 | |||
| #define STM32_ICU_TIM2_IRQ_PRIORITY 7 | |||
| #define STM32_ICU_TIM3_IRQ_PRIORITY 7 | |||
| #define STM32_ICU_TIM4_IRQ_PRIORITY 7 | |||
| #define STM32_ICU_TIM5_IRQ_PRIORITY 7 | |||
| #define STM32_ICU_TIM8_IRQ_PRIORITY 7 | |||
| /* | |||
| * PWM driver system settings. | |||
| */ | |||
| #define STM32_PWM_USE_ADVANCED FALSE | |||
| #define STM32_PWM_USE_TIM1 FALSE | |||
| #define STM32_PWM_USE_TIM2 FALSE | |||
| #define STM32_PWM_USE_TIM3 FALSE | |||
| #define STM32_PWM_USE_TIM4 FALSE | |||
| #define STM32_PWM_USE_TIM5 FALSE | |||
| #define STM32_PWM_USE_TIM8 FALSE | |||
| #define STM32_PWM_TIM1_IRQ_PRIORITY 7 | |||
| #define STM32_PWM_TIM2_IRQ_PRIORITY 7 | |||
| #define STM32_PWM_TIM3_IRQ_PRIORITY 7 | |||
| #define STM32_PWM_TIM4_IRQ_PRIORITY 7 | |||
| #define STM32_PWM_TIM5_IRQ_PRIORITY 7 | |||
| #define STM32_PWM_TIM8_IRQ_PRIORITY 7 | |||
| /* | |||
| * RTC driver system settings. | |||
| */ | |||
| #define STM32_RTC_IRQ_PRIORITY 15 | |||
| /* | |||
| * SERIAL driver system settings. | |||
| */ | |||
| #define STM32_SERIAL_USE_USART1 FALSE | |||
| #define STM32_SERIAL_USE_USART2 FALSE | |||
| #define STM32_SERIAL_USE_USART3 FALSE | |||
| #define STM32_SERIAL_USE_UART4 FALSE | |||
| #define STM32_SERIAL_USE_UART5 FALSE | |||
| #define STM32_SERIAL_USART1_PRIORITY 12 | |||
| #define STM32_SERIAL_USART2_PRIORITY 12 | |||
| #define STM32_SERIAL_USART3_PRIORITY 12 | |||
| #define STM32_SERIAL_UART4_PRIORITY 12 | |||
| #define STM32_SERIAL_UART5_PRIORITY 12 | |||
| /* | |||
| * SPI driver system settings. | |||
| */ | |||
| #define STM32_SPI_USE_SPI1 FALSE | |||
| #define STM32_SPI_USE_SPI2 FALSE | |||
| #define STM32_SPI_USE_SPI3 FALSE | |||
| #define STM32_SPI_SPI1_DMA_PRIORITY 1 | |||
| #define STM32_SPI_SPI2_DMA_PRIORITY 1 | |||
| #define STM32_SPI_SPI3_DMA_PRIORITY 1 | |||
| #define STM32_SPI_SPI1_IRQ_PRIORITY 10 | |||
| #define STM32_SPI_SPI2_IRQ_PRIORITY 10 | |||
| #define STM32_SPI_SPI3_IRQ_PRIORITY 10 | |||
| #define STM32_SPI_DMA_ERROR_HOOK(spip) osalSysHalt("DMA failure") | |||
| /* | |||
| * ST driver system settings. | |||
| */ | |||
| #define STM32_ST_IRQ_PRIORITY 8 | |||
| #define STM32_ST_USE_TIMER 2 | |||
| /* | |||
| * UART driver system settings. | |||
| */ | |||
| #define STM32_UART_USE_USART1 FALSE | |||
| #define STM32_UART_USE_USART2 FALSE | |||
| #define STM32_UART_USE_USART3 FALSE | |||
| #define STM32_UART_USART1_IRQ_PRIORITY 12 | |||
| #define STM32_UART_USART2_IRQ_PRIORITY 12 | |||
| #define STM32_UART_USART3_IRQ_PRIORITY 12 | |||
| #define STM32_UART_USART1_DMA_PRIORITY 0 | |||
| #define STM32_UART_USART2_DMA_PRIORITY 0 | |||
| #define STM32_UART_USART3_DMA_PRIORITY 0 | |||
| #define STM32_UART_DMA_ERROR_HOOK(uartp) osalSysHalt("DMA failure") | |||
| /* | |||
| * USB driver system settings. | |||
| */ | |||
| #define STM32_USB_USE_USB1 TRUE | |||
| #define STM32_USB_LOW_POWER_ON_SUSPEND FALSE | |||
| #define STM32_USB_USB1_HP_IRQ_PRIORITY 13 | |||
| #define STM32_USB_USB1_LP_IRQ_PRIORITY 14 | |||
| #endif /* _MCUCONF_H_ */ | |||
Загрузка…