
 wolfv6
7 anos atrás
wolfv6
7 anos atrás
39 arquivos alterados com 730 adições e 95 exclusões
+ 71
- 13
CONTRIBUTING.md
Ver arquivo
| @@ -4,8 +4,8 @@ We'd love for you to contribute to the keybrd project. | |||
| Improvement suggestions | |||
| ----------------------- | |||
| We need to know what improvements to the keybrd library would help you create your keyboard design. | |||
| Before requesting an improvement, please check [planned_features list](doc/planned_features.md) | |||
| We need to know what keybrd library improvements would help you create keyboard designs. | |||
| Before requesting an improvement, please check the [planned_features list](doc/planned_features.md). | |||
| Submit improvement suggestions to [GitHub issues](https://github.com/wolfv6/Keybrd/issues) | |||
| or [geekhack thread](https://geekhack.org/index.php?topic=83599.0). | |||
| @@ -16,8 +16,8 @@ or [geekhack thread](https://geekhack.org/index.php?topic=83599.0). | |||
| Bug reports | |||
| ----------- | |||
| A bug report is the first step in finding a bug. | |||
| Once it is found, correcting it is usually relatively easy. | |||
| Submitting a bug report is the first step in fixing a bug. | |||
| Once it is found, correcting a bug is usually relatively easy. | |||
| Please submit bug reports to [GitHub issues](https://github.com/wolfv6/Keybrd/issues) | |||
| or [geekhack thread](https://geekhack.org/index.php?topic=83599.0). | |||
| @@ -33,7 +33,7 @@ Provide enough information so we can reproduce the buggy behaviour! | |||
| Code contributions | |||
| ------------------ | |||
| Unsure where to begin contributing to keybrd code? | |||
| Unsure of where to begin contributing to keybrd code? | |||
| You can start by looking through the improvement suggestions, bug reports, and [planned_features](doc/planned_features.md). | |||
| Git commit message style guide: | |||
| @@ -49,18 +49,57 @@ Any project requires various kinds of contributions to succeed. | |||
| A thriving project is more than a pile of code. | |||
| It's the packaging, explanation, outreach, and empathy of maintainers that make a good project great. | |||
| ### Beta testing | |||
| keybrd library has been Alpha tested on the DodoHand keyboard, tutorial sketches, Teensy 2.0, and Teensy LC. What we need now are Beta testers: | |||
| * use the tutorials (feedback from noobs is especially valuable) | |||
| * use the keybrd library to implement your own keyboard design | |||
| ### keybrd tutorials usability survey | |||
| We want feedback on keybrd tutorial usability from real users (feedback from noobs is especially valuable). | |||
| Please take the survey after completing a tutorial. | |||
| Answer the questions you feel like answering, or make up your own questions. | |||
| Feedback from Beta testers will be used to make improvements to the keybrd library. | |||
| * How easy was it to find the relevant tutorial? | |||
| * Which tutorial did you read? | |||
| * Did the tutorial provide complete information? | |||
| * What other tutorial topics would be useful? | |||
| * Are you satisfied with the tutorial? | |||
| * Other comments or suggestions. | |||
| Post the completed Q & A on [geekhack thread](https://geekhack.org/index.php?topic=83599.0) with a heading "Tutorial usability survey". | |||
| If you prefer your answers remain confidential, pm the completed Q & A to [wolfv](https://geekhack.org/index.php?action=pm;sa=send;u=25471). | |||
| Usability survey results will be used to make improvements to the tutorials. | |||
| ### keybrd library usability survey | |||
| We want feedback on keybrd library usability from real users. | |||
| Please fill the survey after using the keybrd library to implement a keyboard design. | |||
| Answer the questions you feel like answering, or make up your own questions. | |||
| * How easy was it to find relevant information? | |||
| * Did the User guide provide complete information? | |||
| * What other keyboard firmware have you used? | |||
| * What pros and cons did you find compared to other keyboard firmware? | |||
| * Did you publish your keyboard firmware? If so, please provide a link. | |||
| * Are you satisfied with the keybrd library? | |||
| * Other comments or suggestions. | |||
| Post the completed Q & A on [geekhack thread](https://geekhack.org/index.php?topic=83599.0) with a heading "keybrd library usability survey". | |||
| If you prefer your answers remain confidential, pm the completed Q & A to [wolfv](https://geekhack.org/index.php?action=pm;sa=send;u=25471). | |||
| Usability survey results will be used to make improvements to the keybrd library. | |||
| ### Schematics | |||
| The most glaring deficiency is the tutorials' lack of schematics. | |||
| Schematics would be an improvement over the current photos. | |||
| Schematics would be easier to read than the current photos. | |||
| Schematics are not my area of expertise. Use what ever you think would be the best solution for the tutorials: | |||
| Schematics are not my area of expertise. Use what ever would be the best solution for the tutorials: | |||
| * schematics | |||
| * breadboard drawings | |||
| * Arduino simulation software | |||
| @@ -71,12 +110,29 @@ Contributions of tutorial schematics would benefit users new to the keybrd libra | |||
| Suggest a clarification, simplification, correction, or other improvement. | |||
| We need the perspective of people new to the project to see these things. | |||
| Sometimes just changing a word or two makes a big difference. | |||
| Please submit improvement and errata to [GitHub issues](https://github.com/wolfv6/Keybrd/issues) | |||
| or [geekhack thread](https://geekhack.org/index.php?topic=83599.0). | |||
| Text file documentation style guide: | |||
| * Use Markdown with a .md suffix. | |||
| * "Underline" first-level (=) and second-level (-) headings (because easier to read in plain text). | |||
| * Capitalize first letter of headings (no extra capitalization in headings). | |||
| ### Write a sketch for a keyboard that is popular with Arduino-compatible controllers | |||
| Write a keybrd sketch for a keyboard that is popular with Arduino-compatible controllers. | |||
| * You should own the keyboard so you can test the firmware | |||
| * The keyboard should have an Arduino compatible controller (e.g. ErgoDox and Phantom use Teensy 2.0) | |||
| * The layout should be a plain baseline layout (QWERTY) | |||
| Other owners of that model keyboard can then easily modify and compile the sketch on Arduino IDE. | |||
| The README should have: | |||
| * brief description of the electronics | |||
| * link to a hardware page | |||
| * list any firmware deficiencies | |||
| Follow the "Publish" instructions in tutorial_8c_sharing_your_keybrd_sketch.md | |||
| ### Blog | |||
| You have a fresh perspective of how the keybrd library works. | |||
| This makes you the perfect person to write an introductory blog explaining the project. | |||
| @@ -85,5 +141,7 @@ A healthy project needs the perspective of many people. | |||
| Submitting a pull request | |||
| ------------------------- | |||
| Pull request is the preferred way to contribute code and documentation. | |||
| If you want to contribute some other way, please make a request in the [GitHub issues](https://github.com/wolfv6/Keybrd/issues). | |||
| If you want to contribute some other way, please make a request in | |||
| [GitHub issues](https://github.com/wolfv6/Keybrd/issues) | |||
| or [geekhack thread](https://geekhack.org/index.php?topic=83599.0). | |||
BIN
IOE_scan_development/IOE_scan_development.ods
Ver arquivo
BIN
IOE_scan_development/openDrain_activeLow/back.JPG
Ver arquivo
{kind=link}
BIN
IOE_scan_development/openDrain_activeLow/front.JPG
Ver arquivo
{kind=link}
+ 69
- 0
IOE_scan_development/openDrain_activeLow/openDrain_activeLow.ino
Ver arquivo
| @@ -0,0 +1,69 @@ | |||
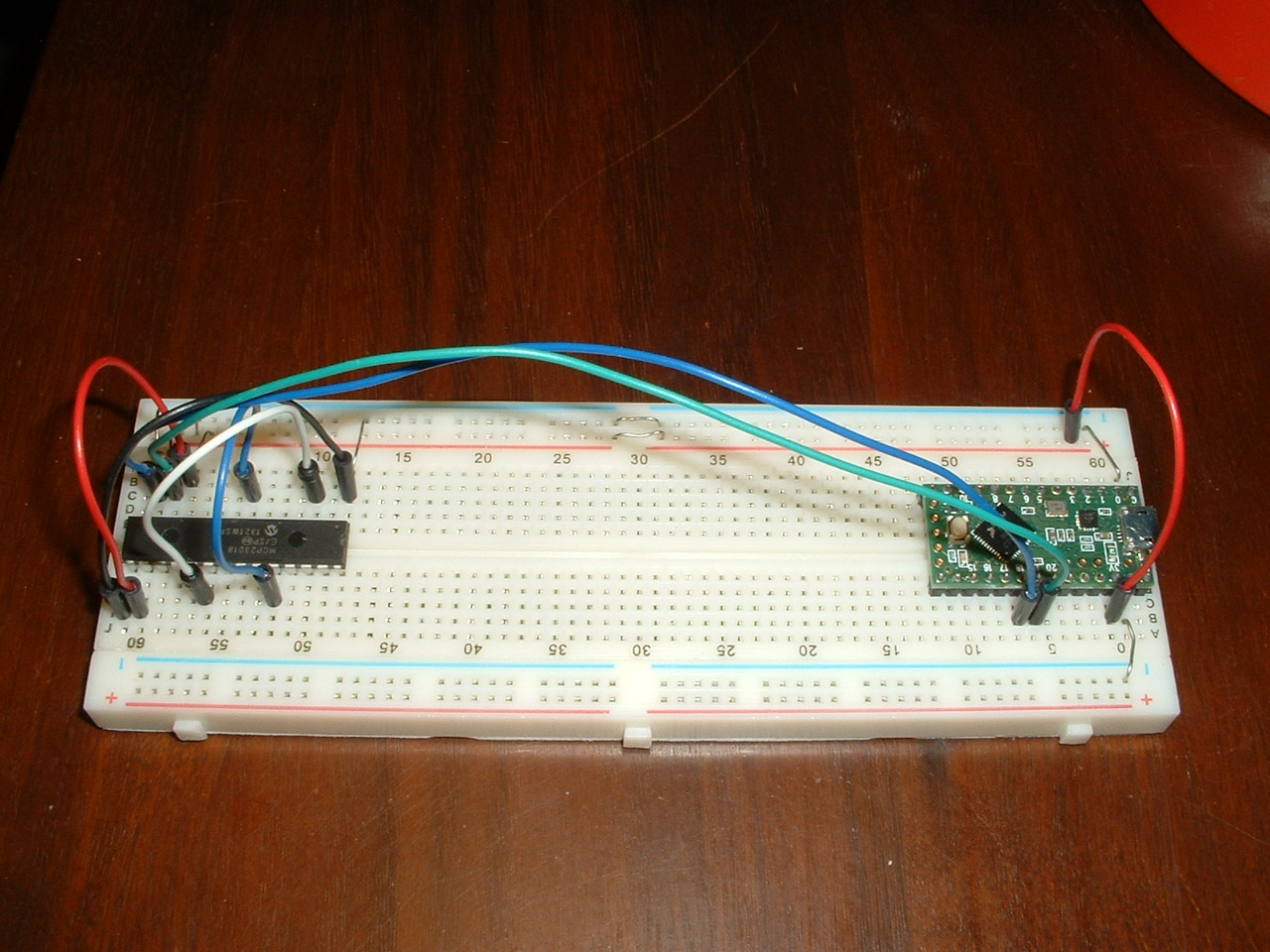
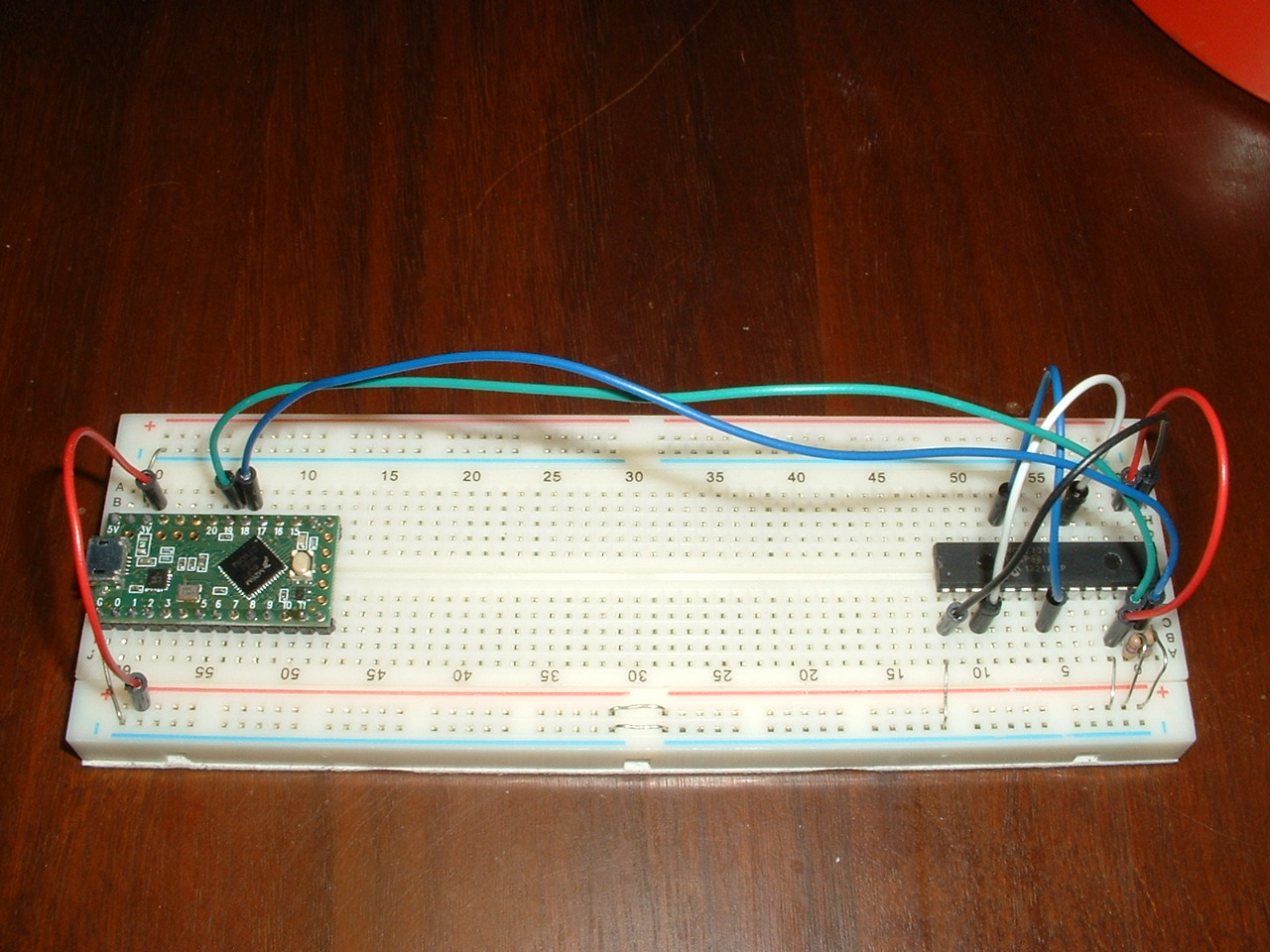
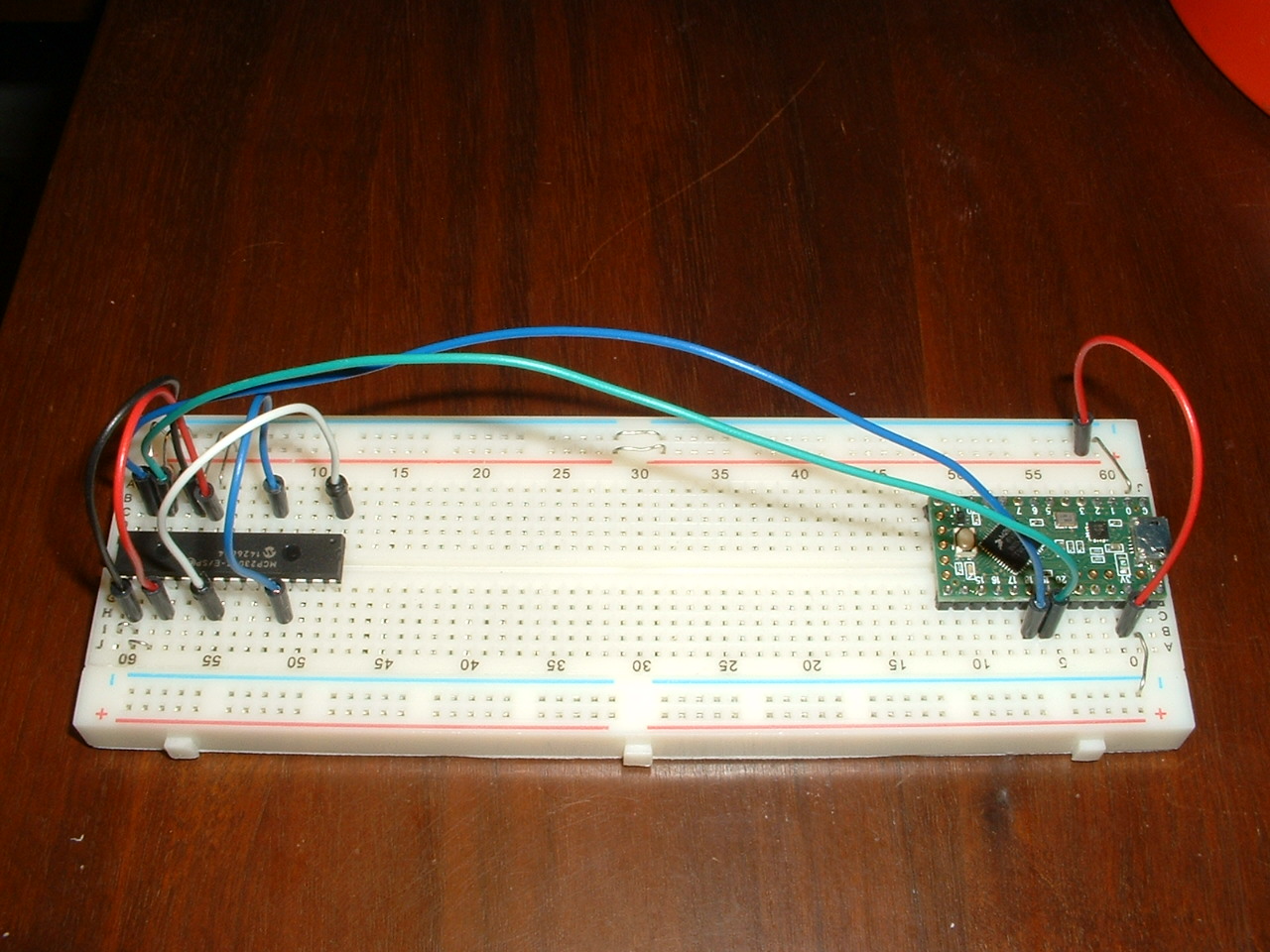
| /* simulate one scan of a key martix, on open-drain active-low I/O expander | |||
| BREADBOARD SETUP ******************************* | |||
| Teensy LC connected to MCP23018 I/O expander via I2C | |||
| 4.7k Ohm pullup resistors on SDA and SCL | |||
| use volt meter to measure pin voltages | |||
| MCP23018 has open-drain outputs (open-drain can only sink current) | |||
| MCP23018 PIN DIAGRAM *************************** | |||
| write port B read port A | |||
| GND VSS 1 28 NC | |||
| NC 2 27 GPA7 | |||
| jumper0 GPB0 3 26 GPA6 | |||
| GPB1 4 25 GPA5 | |||
| GPB2 5 24 GPA4 jumper4 | |||
| GPB3 6 23 GPA3 | |||
| jumper4 GPB4 7 22 GPA2 | |||
| GPB5 8 21 GPA1 | |||
| GPB6 9 20 GPA0 jumper0 | |||
| GPB7 10 19 INTA | |||
| power VDD 11 18 INTB | |||
| SCL SCL 12 17 NC | |||
| SDA SDA 13 16 RESET power | |||
| NC 14 15 ADDR GND | |||
| */ | |||
| #include "Wire.h" | |||
| const uint8_t ADDR = 0x20; //MCP23018 I2C address with ADDR pin grounded | |||
| void setup() | |||
| { | |||
| delay(1000); //time for Serial print to work | |||
| // ================= configure ================ | |||
| Serial.print("config "); | |||
| Wire.begin(); | |||
| Wire.beginTransmission(ADDR); | |||
| Wire.write(0x01); //IODIRB Configure | |||
| Wire.write(0); //as output | |||
| Wire.endTransmission(); | |||
| Wire.beginTransmission(ADDR); | |||
| Wire.write(0x00); //IODIRA Configuration | |||
| Wire.write(~0); //as input | |||
| Wire.endTransmission(); | |||
| Wire.beginTransmission(ADDR); | |||
| Wire.write(0x0C); //GPPUA pull-up | |||
| Wire.write(~0); //pull-up enabled | |||
| Wire.endTransmission(); | |||
| // =================== scan =================== | |||
| Serial.println("scan"); | |||
| Wire.beginTransmission(ADDR); | |||
| Wire.write(0x13); //GPIOB output | |||
| Wire.write(B00001111); //pins 0-3 off, pins 4-7 sink on (strobe, LED on) | |||
| Wire.endTransmission(); | |||
| Wire.beginTransmission(ADDR); | |||
| Wire.write(0x12); //GPIOA (immediately before requestFrom) | |||
| Wire.endTransmission(); | |||
| Wire.requestFrom(ADDR, static_cast<uint8_t>(1)); //request one byte from GPIOA read | |||
| Serial.print("portA="); | |||
| Serial.println(Wire.read(), BIN); //prints portA=11101111 | |||
| } | |||
| void loop() { } | |||
BIN
IOE_scan_development/source_activeHigh/DSCF0003.JPG
Ver arquivo
{kind=link}
BIN
IOE_scan_development/source_activeHigh/DSCF0004.JPG
Ver arquivo
{kind=link}
+ 69
- 0
IOE_scan_development/source_activeHigh/source_activeHigh.ino
Ver arquivo
| @@ -0,0 +1,69 @@ | |||
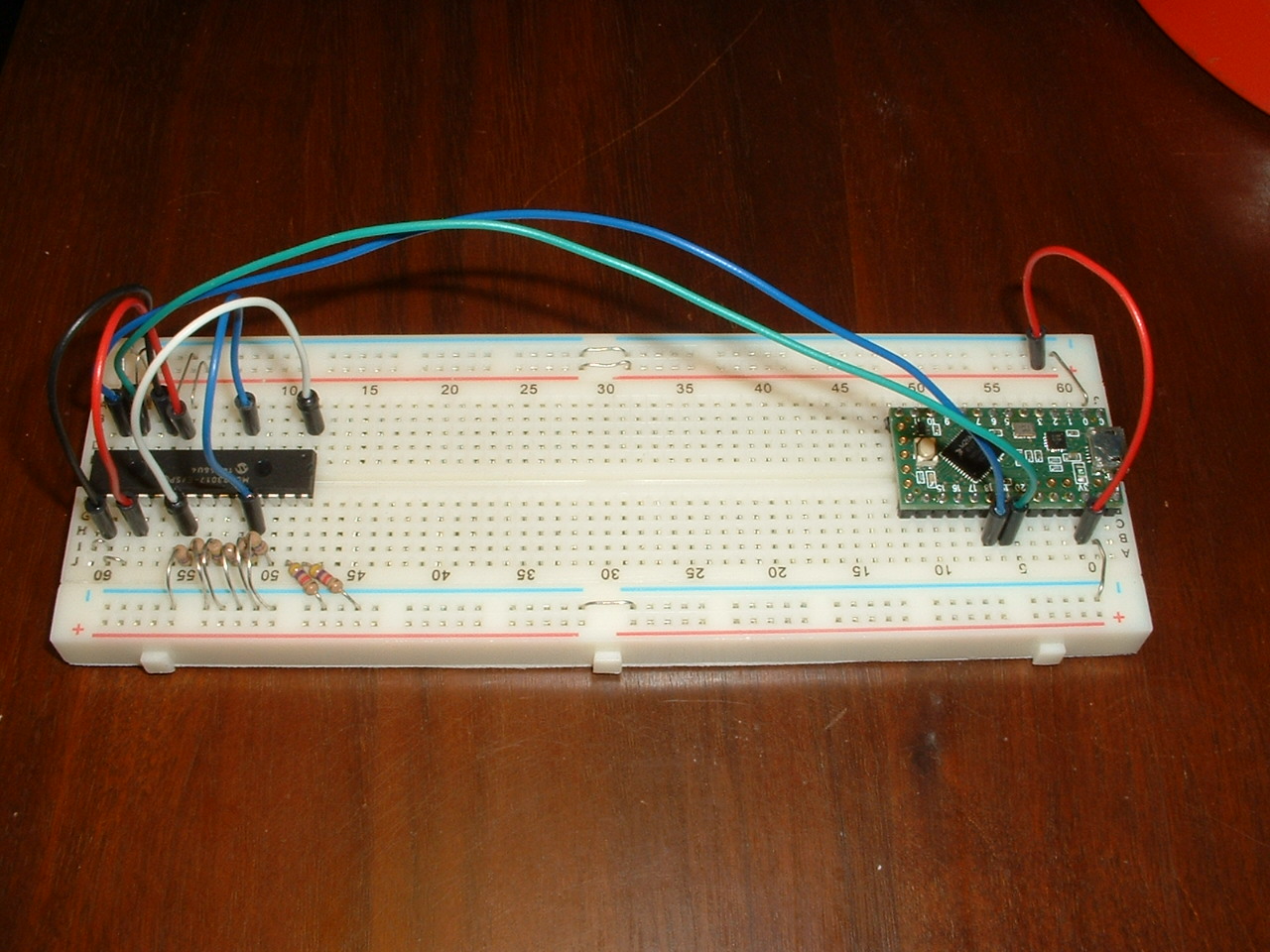
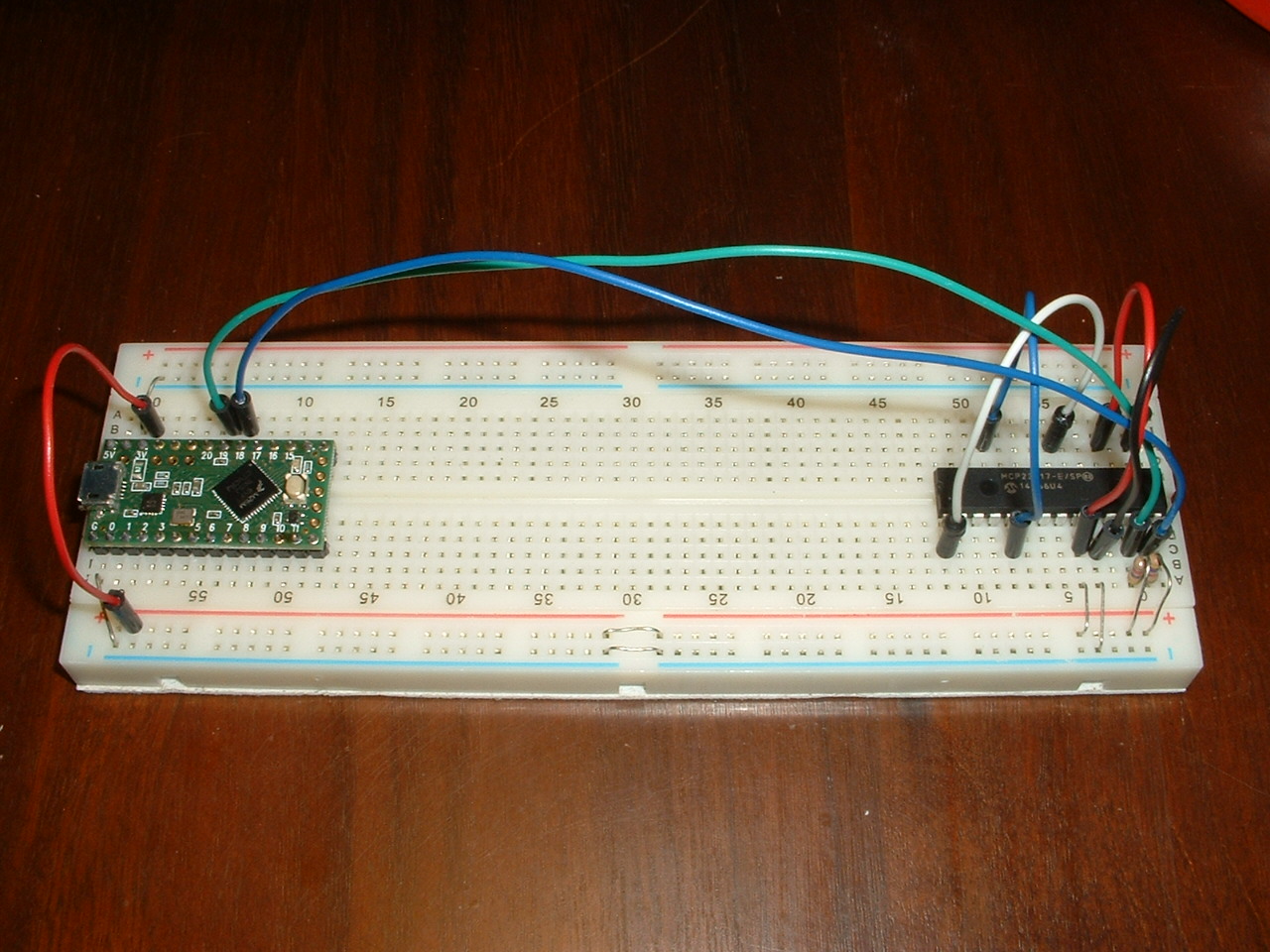
| /* simulate one scan of a key martix, on source active-high I/O expander | |||
| BREADBOARD SETUP ******************************* | |||
| Teensy LC connected to MCP23017 I/O expander via I2C | |||
| 10k Ohm external pulldown resistors on port A | |||
| 4.7k Ohm pullup resistors on SDA and SCL | |||
| use volt meter to measure pin voltages | |||
| MCP23017 PIN DIAGRAM *************************** | |||
| write port B read port A | |||
| jumper0 GPB0 1 26 GPA7 pulldown | |||
| GPB1 2 25 GPA6 pulldown | |||
| GPB2 3 24 GPA5 pulldown | |||
| GPB3 4 23 GPA4 pulldown jumper4 | |||
| jumper4 GPB4 5 22 GPA3 pulldown | |||
| GPB5 6 21 GPA2 pulldown | |||
| GPB6 7 20 GPA1 pulldown | |||
| GPB7 8 19 GPA0 pulldown jumper0 | |||
| power VDD 9 18 INTA | |||
| GND VSS 10 28 INTB | |||
| NC 11 27 RESET power | |||
| SCL SCL 12 17 A2 gnd | |||
| SDA SDA 13 16 A1 gnd | |||
| NC 14 15 A0 gnd | |||
| */ | |||
| #include "Wire.h" | |||
| const uint8_t ADDR = 0x20; //MCP23017 I2C address with all ADDR pins grounded | |||
| void setup() | |||
| { | |||
| delay(1000); //time for Serial print to work | |||
| // ================= configure ================ | |||
| Serial.print("config "); | |||
| Wire.begin(); | |||
| Wire.beginTransmission(ADDR); | |||
| Wire.write(0x01); //IODIRB Configure | |||
| Wire.write(0); //as output | |||
| Wire.endTransmission(); | |||
| Wire.beginTransmission(ADDR); | |||
| Wire.write(0x00); //IODIRA Configuration | |||
| Wire.write(~0); //as input | |||
| Wire.endTransmission(); | |||
| Wire.beginTransmission(ADDR); | |||
| Wire.write(0x0C); //GPPUA pull-up | |||
| Wire.write(0); //pull-up disabled | |||
| Wire.endTransmission(); | |||
| // =================== scan =================== | |||
| Serial.println("scan"); | |||
| Wire.beginTransmission(ADDR); | |||
| Wire.write(0x13); //GPIOB output | |||
| Wire.write(B11110000); //pins 0-3 ground, pins 4-7 power (strobe, LED on) | |||
| Wire.endTransmission(); | |||
| Wire.beginTransmission(ADDR); | |||
| Wire.write(0x12); //GPIOA (immediately before requestFrom) | |||
| Wire.endTransmission(); | |||
| Wire.requestFrom(ADDR, static_cast<uint8_t>(1)); //request one byte from GPIOA read | |||
| Serial.print("portA="); | |||
| Serial.println(Wire.read(), BIN); //prints portA=00010000 | |||
| } | |||
| void loop() { } | |||
BIN
IOE_scan_development/source_activeLow/back.JPG
Ver arquivo
{kind=link}
BIN
IOE_scan_development/source_activeLow/front.JPG
Ver arquivo
{kind=link}
+ 68
- 0
IOE_scan_development/source_activeLow/source_activeLow.ino
Ver arquivo
| @@ -0,0 +1,68 @@ | |||
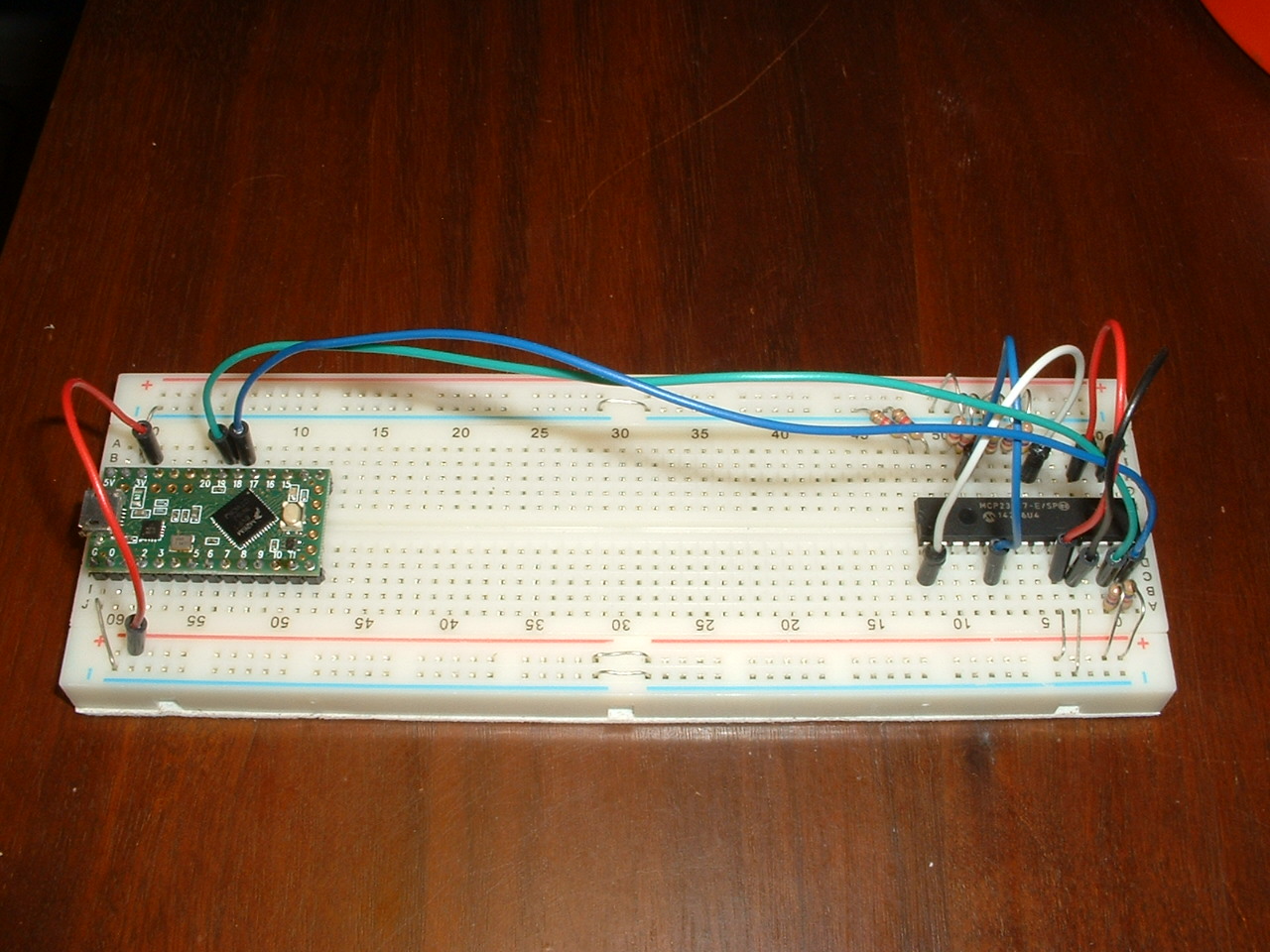
| /* simulate one scan of a key martix, on source active-low I/O expander | |||
| BREADBOARD SETUP ******************************* | |||
| Teensy LC connected to MCP23017 I/O expander via I2C | |||
| 4.7k Ohm pullup resistors on SDA and SCL | |||
| use volt meter to measure pin voltages | |||
| MCP23017 PIN DIAGRAM *************************** | |||
| write port B read port A | |||
| jumper0 GPB0 1 26 GPA7 | |||
| GPB1 2 25 GPA6 | |||
| GPB2 3 24 GPA5 | |||
| GPB3 4 23 GPA4 jumper4 | |||
| jumper4 GPB4 5 22 GPA3 | |||
| GPB5 6 21 GPA2 | |||
| GPB6 7 20 GPA1 | |||
| GPB7 8 19 GPA0 jumper0 | |||
| power VDD 9 18 INTA | |||
| GND VSS 10 28 INTB | |||
| NC 11 27 RESET power | |||
| SCL SCL 12 17 A2 gnd | |||
| SDA SDA 13 16 A1 gnd | |||
| NC 14 15 A0 gnd | |||
| */ | |||
| #include "Wire.h" | |||
| const uint8_t ADDR = 0x20; //MCP23017 I2C address with all ADDR pins grounded | |||
| void setup() | |||
| { | |||
| delay(1000); //time for Serial print to work | |||
| // ================= configure ================ | |||
| Serial.print("config "); | |||
| Wire.begin(); | |||
| Wire.beginTransmission(ADDR); | |||
| Wire.write(0x01); //IODIRB Configure | |||
| Wire.write(0); //as output | |||
| Wire.endTransmission(); | |||
| Wire.beginTransmission(ADDR); | |||
| Wire.write(0x00); //IODIRA Configuration | |||
| Wire.write(~0); //as input | |||
| Wire.endTransmission(); | |||
| Wire.beginTransmission(ADDR); | |||
| Wire.write(0x0C); //GPPUA pull-up | |||
| Wire.write(~0); //pull-up enabled | |||
| Wire.endTransmission(); | |||
| // =================== scan =================== | |||
| Serial.println("scan"); | |||
| Wire.beginTransmission(ADDR); | |||
| Wire.write(0x13); //GPIOB output | |||
| Wire.write(B00001111); //pins 0-3 power (strobe, LED on), pins 4-7 ground | |||
| Wire.endTransmission(); | |||
| Wire.beginTransmission(ADDR); | |||
| Wire.write(0x12); //GPIOA (immediately before requestFrom) | |||
| Wire.endTransmission(); | |||
| Wire.requestFrom(ADDR, static_cast<uint8_t>(1)); //request one byte from GPIOA read | |||
| Serial.print("portA="); | |||
| Serial.println(Wire.read(), BIN); //prints portA=11101111 | |||
| } | |||
| void loop() { } | |||
+ 0
- 5
doc/CHANGELOG.md
Ver arquivo
| @@ -6,11 +6,6 @@ This project adheres to [Semantic Versioning 2.0.0](http://semver.org/). | |||
| keybrd version 0.x.x is for initial development. | |||
| keybrd version 1.0.0 will be released when the public API is stable. | |||
| < !-- | |||
| Unreleased | |||
| ---------- | |||
| --> | |||
| 0.6.0 (2016-09-28) | |||
| ------------------ | |||
| * Enhancements | |||
+ 3
- 5
doc/PLANNED_FEATURES.md
Ver arquivo
| @@ -2,14 +2,12 @@ planned_features is a view of where the keybrd project is headed. | |||
| Top priority | |||
| ------------ | |||
| * Beta testing | |||
| * Add breadboard keyboard schematics to tutorials | |||
| * User testing | |||
| Medium priority | |||
| --------------- | |||
| * Add matrix-to-layout mapping array (to decouple key matrix from layout) | |||
| * Add tutorial_4b_split_keyboard_with_shift_registers | |||
| * Add matrix-to-layout mapping (to decouple key matrix from layout) | |||
| * Add breadboard keyboard schematics to tutorials | |||
| Low priority | |||
| ------------ | |||
| * Add MCP23S18 I/O expander with Serial Peripheral Interface (SPI) | |||
+ 131
- 0
examples/keybrd_MCP23018/keybrd_MCP23018.ino
Ver arquivo
| @@ -0,0 +1,131 @@ | |||
| /* keybrd_MCP23018.ino | |||
| This sketch: | |||
| is a simple 1-layer keyboard | |||
| runs on two matrices of a breadboard keyboard | |||
| Controller I/O expander | |||
| | Left | **0** | **1** | | Right | **0** | **1** | | |||
| |-------|-------|-------| |-------|-------|-------| | |||
| | **1** | 1 | 2 | | **1** | 3 | 4 | | |||
| | **0** | a | b | | **0** | c | d | | |||
| */ | |||
| // ################## GLOBAL ################### | |||
| // ================= INCLUDES ================== | |||
| #include <ScanDelay.h> | |||
| #include <Code_Sc.h> | |||
| #include <Code_LEDLock.h> | |||
| #include <Row.h> | |||
| //left matrix | |||
| #include <Scanner_uC.h> | |||
| //right matrix | |||
| #include <Port_MCP23018.h> | |||
| #include <Scanner_IOE.h> | |||
| #include <LED_Port.h> | |||
| // ============ SPEED CONFIGURATION ============ | |||
| ScanDelay scanDelay(9000); | |||
| /* ================ LEFT SCANNER =============== | |||
| Left matrix rows work the same as the ones in keybrd_2_single-layer.ino | |||
| */ | |||
| uint8_t readPins[] = {14, 15}; | |||
| const uint8_t readPinCount = sizeof(readPins)/sizeof(*readPins); | |||
| Scanner_uC scanner_L(LOW, readPins, readPinCount); | |||
| /* =============== RIGHT SCANNER =============== | |||
| The right matrix is scanned by an I/O expander. | |||
| The MCP23018 address is set by grounding or powering pins. | |||
| */ | |||
| const uint8_t IOE_ADDR = 0x20; //MCP23018 address pin grounded | |||
| /* | |||
| Normally all strobe pins are on one port, and all the read pins are on the other port. | |||
| In this example, portB stobes the row while portA reads the colums. | |||
| Port_MCP23018 constructor parameters are: deviceAddr, portNum, readPins. | |||
| readPins is a bit pattern, where 0=output, 1=input. | |||
| In portA, the first two pins are set to input for reading. | |||
| "<<" (bit shift left) and "|" (OR) are bitwise operators. | |||
| Pin numbers to be read are delimited by "|" and to the right of "1<<". | |||
| */ | |||
| Port_MCP23018 portA(IOE_ADDR, 0, 1<<0 | 1<<1 ); //read pins 0, 1 | |||
| Port_MCP23018 portB(IOE_ADDR, 1, 0); | |||
| Scanner_IOE scanner_R(LOW, portB, portA); | |||
| /* ================= RIGHT LED ================= | |||
| The LED_Port constructor parameters are a port and pin number that is connected to an LED. | |||
| */ | |||
| LED_Port LED_capsLck(portA, 1<<7); | |||
| // =================== CODES =================== | |||
| Code_Sc s_a(KEY_A); | |||
| Code_Sc s_b(KEY_B); | |||
| Code_Sc s_c(KEY_C); | |||
| Code_Sc s_d(KEY_D); | |||
| Code_Sc s_1(KEY_1); | |||
| Code_Sc s_2(KEY_2); | |||
| Code_Sc s_3(KEY_3); | |||
| Code_Sc s_4(KEY_4); | |||
| Code_LEDLock o_capsLock(KEY_CAPS_LOCK, LED_capsLck);//todo was testing LED, restore s_4 when done | |||
| /* =================== ROWS ==================== | |||
| Left row names contain the letter 'L', while right row names conatain the letter 'R'. | |||
| Row constructor parameters are: scanner, strobePin, ptrsKeys[], keyCount. | |||
| strobePin has one of two formats: | |||
| * if refScanner a Scanner_uC, then strobePin is an Arduino pin number connected to this row | |||
| * otherwise strobePin is a bit pattern, 1 indicating an IC pin connected to the row | |||
| */ | |||
| /* ---------------- LEFT ROWS ------------------ | |||
| The left rows have a Scanner_uC and Arduino pin numbers to strobe. | |||
| */ | |||
| Key* ptrsKeys_L0[] = { &s_1, &s_2 }; | |||
| const uint8_t KEY_COUNT_L0 = sizeof(ptrsKeys_L0)/sizeof(*ptrsKeys_L0); | |||
| Row row_L0(scanner_L, 0, ptrsKeys_L0, KEY_COUNT_L0); | |||
| Key* ptrsKeys_L1[] = { &s_a, &s_b }; | |||
| const uint8_t KEY_COUNT_L1 = sizeof(ptrsKeys_L1)/sizeof(*ptrsKeys_L1); | |||
| Row row_L1(scanner_L, 1, ptrsKeys_L1, KEY_COUNT_L1); | |||
| /* ---------------- RIGHT ROWS ----------------- | |||
| The right rows have a Scanner_IOE and pin bits to strobe. | |||
| */ | |||
| Key* ptrsKeys_R0[] = { &s_3, &o_capsLock }; | |||
| const uint8_t KEY_COUNT_R0 = sizeof(ptrsKeys_R0)/sizeof(*ptrsKeys_R0); | |||
| Row row_R0(scanner_R, 1<<0, ptrsKeys_R0, KEY_COUNT_R0); | |||
| Key* ptrsKeys_R1[] = { &s_c, &s_d }; | |||
| const uint8_t KEY_COUNT_R1 = sizeof(ptrsKeys_R1)/sizeof(*ptrsKeys_R1); | |||
| Row row_R1(scanner_R, 1<<1, ptrsKeys_R1, KEY_COUNT_R1); | |||
| // ################### MAIN #################### | |||
| void setup() | |||
| { | |||
| Keyboard.begin(); | |||
| scanner_R.begin(); | |||
| } | |||
| void loop() | |||
| { | |||
| //left matrix | |||
| row_L0.process(); | |||
| row_L1.process(); | |||
| //right matrix | |||
| row_R0.process(); | |||
| //Keyboard.println(" 0"); | |||
| //delay(2000); | |||
| row_R1.process(); | |||
| //Keyboard.println(" 1"); | |||
| //delay(2000); | |||
| scanDelay.delay(); | |||
| //Keyboard.println(" end loop");//todo | |||
| //debug.print_scans_per_second(); | |||
| //debug.print_microseconds_per_scan(); | |||
| } | |||
+ 33
- 0
src/LED_shiftRegs.cpp
Ver arquivo
| @@ -0,0 +1,33 @@ | |||
| #include "LED_shiftRegs.h" | |||
| /* constructor | |||
| */ | |||
| LED_shiftRegs::LED_shiftRegs(const uint8_t slaveSelect, const uint8_t pin) | |||
| :slaveSelect(slaveSelect), pin(pin) | |||
| { | |||
| pinMode(slaveSelect, OUTPUT); | |||
| } | |||
| /* begin() should be called once from sketch setup(). | |||
| Initializes shift register's shift/load pin. | |||
| */ | |||
| void LED_shiftRegs::begin() | |||
| { | |||
| SPI.begin(); | |||
| digitalWrite(slaveSelect, HIGH); | |||
| } | |||
| //todo preserve other LED values, similar to Port_PCA9655E outputVal | |||
| void LED_shiftRegs::on() | |||
| { | |||
| digitalWrite(slaveSelect, LOW); | |||
| SPI.transfer(pin); | |||
| digitalWrite (slaveSelect, HIGH); | |||
| } | |||
| void LED_shiftRegs::off() | |||
| { | |||
| digitalWrite(slaveSelect, LOW); | |||
| SPI.transfer(0); | |||
| digitalWrite (slaveSelect, HIGH); | |||
| } | |||
+ 22
- 0
src/LED_shiftRegs.h
Ver arquivo
| @@ -0,0 +1,22 @@ | |||
| #ifndef LED_SHIFTREGS_H | |||
| #define LED_SHIFTREGS_H | |||
| #include <Arduino.h> | |||
| #include <inttypes.h> | |||
| #include <SPI.h> | |||
| #include <LEDInterface.h> | |||
| /* A LED_shiftRegs turns LED on and off. | |||
| shift register RCLK pin a.k.a. SS or ST | |||
| */ | |||
| class LED_shiftRegs: public LEDInterface | |||
| { | |||
| private: | |||
| const uint8_t slaveSelect;//controller pin number connected to shift register RCLK | |||
| const uint8_t pin; //bit pattern, shift register pin that is connected to an LED | |||
| public: | |||
| LED_shiftRegs(const uint8_t slaveSelect, const uint8_t pin); | |||
| void begin(); | |||
| virtual void on(); | |||
| virtual void off(); | |||
| }; | |||
| #endif | |||
+ 1
- 1
src/LED_uC.h
Ver arquivo
| @@ -14,7 +14,7 @@ class LED_uC: public LEDInterface | |||
| public: | |||
| LED_uC(const uint8_t pin): pin(pin) | |||
| { | |||
| pinMode(pin, OUTPUT); | |||
| pinMode(pin, OUTPUT);//todo move to .cpp file | |||
| } | |||
| virtual void on(); | |||
| virtual void off(); | |||
+ 83
- 0
src/Port_MCP23018.cpp
Ver arquivo
| @@ -0,0 +1,83 @@ | |||
| #include "Port_MCP23018.h" | |||
| //todo add Port_MCP23018::write() like Port_MCP23S17::transer() ?? | |||
| /* beginProtocol() is called from Scanner_IOE::begin(). Initiates I2C bus. | |||
| MCP23018 supports I2C SCL Clock Frequencies: 100 kHz, 400 kHz, 1000 kHz (Datasheet page 1 & 6) | |||
| The electrical limitation to bus speed is bus capacitance and the length of the wires involved. | |||
| Longer wires require lower clock speeds. | |||
| http://playground.arduino.cc/Main/WireLibraryDetailedReference > Wire.setclock() | |||
| */ | |||
| void Port_MCP23018::beginProtocol() | |||
| { | |||
| Wire.begin(); //initiate I2C bus to 100 kHz | |||
| //Wire.setClock(400000L); //set I2C bus to 400 kHz (have not tested 400 kHz) | |||
| } | |||
| /* begin() is called from Scanner_IOE::begin(). | |||
| Configures port's IODIR and GPPU. | |||
| */ | |||
| void Port_MCP23018::begin(const uint8_t strobeOn) | |||
| { | |||
| uint8_t pullUp; //bits, GPPU 0=pull-up disabled, 1=pull-up enabled | |||
| if (strobeOn == LOW) //if active low | |||
| { | |||
| pullUp = readPins; //0=pull-up disabled (for LED), 1=pull-up enabled (for read) | |||
| } | |||
| else //if active high | |||
| { | |||
| pullUp = 0; //0=pull-up disabled (for external pull-down resistors) | |||
| } | |||
| Wire.beginTransmission(deviceAddr); | |||
| Wire.write(portNum); //IODIR | |||
| Wire.write(readPins); //0=output (for strobe and LED), 1=input (for read) | |||
| Wire.endTransmission(); | |||
| Wire.beginTransmission(deviceAddr); | |||
| Wire.write(portNum + 0x0C); //GPPU | |||
| Wire.write(pullUp); | |||
| Wire.endTransmission(); | |||
| } | |||
| /* write() sets pin output to logicLevel. | |||
| pin is bit pattern, where pin being strobed is 1. | |||
| logicLevel is HIGH or LOW. | |||
| write() does not overwrite the other pins. | |||
| */ | |||
| void Port_MCP23018::write(const uint8_t pin, const bool logicLevel) | |||
| { | |||
| if (logicLevel == LOW) | |||
| { | |||
| outputVal &= ~pin; //set pin output to low | |||
| //Keyboard.print(" low"); | |||
| } | |||
| else | |||
| { | |||
| outputVal |= pin; //set pin output to high | |||
| //Keyboard.print(" high"); | |||
| } | |||
| //Keyboard.print(" outputVal=");//todo | |||
| //Keyboard.println(outputVal); | |||
| Wire.beginTransmission(deviceAddr); | |||
| Wire.write(portNum + 0x12); //GPIO | |||
| Wire.write(outputVal); | |||
| Wire.endTransmission(); | |||
| //delay(4000); | |||
| } | |||
| /* read() returns portState. | |||
| Only portState bits of readPins are valid. | |||
| */ | |||
| uint8_t Port_MCP23018::read() | |||
| { | |||
| Wire.beginTransmission(deviceAddr); | |||
| Wire.write(portNum + 0x12); //GPIO | |||
| Wire.endTransmission(false); //MCP23018 needs false to send a restart ??really? | |||
| Wire.requestFrom(deviceAddr, 1u); //request one byte from input port | |||
| return Wire.read(); | |||
| } | |||
+ 48
- 0
src/Port_MCP23018.h
Ver arquivo
| @@ -0,0 +1,48 @@ | |||
| #ifndef PORT_MCP23018_H | |||
| #define PORT_MCP23018_H | |||
| #include <Arduino.h> | |||
| #include <inttypes.h> | |||
| #include <Wire.h> | |||
| #include <PortInterface.h> | |||
| /* | |||
| write pins are connected to matrix Row (strobe pin) or LED. | |||
| readPins are connected to matrix column to read which keys are pressed. | |||
| MCP23018 has open-drain outputs (open-drain can only sink current). If LEDs are used, connect: | |||
| LED anodes (the longer lead) to power | |||
| LED cathodes (the shorter lead) to GPIO pin | |||
| Instantiation | |||
| ------------ | |||
| Example instantiation: | |||
| const uint8_t IOE_ADDR = 0x20; //MCP23018 address pin grounded | |||
| Port_MCP23018 portB(IOE_ADDR, 1, 0); //all pins are set to output for strobes and LEDs | |||
| Port_MCP23018 portA(IOE_ADDR, 0, 1<<0 | 1<<1 ); //pin 0 and pin 1 are set to input for reading, | |||
| //remaining pins can be used for LEDs | |||
| Diode orientation | |||
| ---------------- | |||
| Diode orientation is explained in keybrd_library_user_guide.md > Diode orientation | |||
| MCP23018 data sheet | |||
| ---------------- | |||
| http://ww1.microchip.com/downloads/en/DeviceDoc/22103a.pdf | |||
| */ | |||
| class Port_MCP23018 : public PortInterface | |||
| { | |||
| private: | |||
| const uint8_t deviceAddr; | |||
| const uint8_t portNum; //port identification number, 0=A, 1=B | |||
| uint8_t outputVal; //bit pattern for strobe and LEDs | |||
| const uint8_t readPins; //bit pattern, IODIR 0=output, 1=input | |||
| public: | |||
| Port_MCP23018(const uint8_t deviceAddr, const uint8_t portNum, const uint8_t readPins) | |||
| : deviceAddr(deviceAddr), portNum(portNum), outputVal(0), readPins(readPins) {} | |||
| void beginProtocol(); | |||
| void begin(const uint8_t strobeOn); | |||
| virtual void write(const uint8_t pin, const bool logicLevel); | |||
| virtual uint8_t read(); | |||
| }; | |||
| #endif | |||
+ 5
- 5
src/Port_MCP23S17.cpp
Ver arquivo
| @@ -22,7 +22,7 @@ uint8_t Port_MCP23S17::transfer(const uint8_t command, const uint8_t registerAdd | |||
| return portState; | |||
| } | |||
| /* begin() is called from Scanner_IOE::begin(). Initiates SPI bus. | |||
| /* beginProtocol() is called from Scanner_IOE::begin(). Initiates SPI bus. | |||
| */ | |||
| void Port_MCP23S17::beginProtocol() | |||
| { | |||
| @@ -39,13 +39,13 @@ void Port_MCP23S17::begin(const uint8_t strobeOn) | |||
| { | |||
| uint8_t pullUp; //bits, GPPU 0=pull-up disabled, 1=pull-up enabled | |||
| if (strobeOn == LOW) //if active low, use internal pull-up resistors | |||
| if (strobeOn == LOW) //if active low | |||
| { | |||
| pullUp = readPins; | |||
| pullUp = readPins; //0=pull-up disabled (for LED), 1=pull-up enabled (for read) | |||
| } | |||
| else //active high requires external pull-down resistors | |||
| else //if active high | |||
| { | |||
| pullUp = 0; | |||
| pullUp = 0; //0=pull-up disabled (for external pull-down resistors) | |||
| } | |||
| transfer(deviceAddr << 1, portNum, readPins); //configure IODIR | |||
+ 1
- 1
src/Port_PCA9655E.cpp
Ver arquivo
| @@ -1,6 +1,6 @@ | |||
| #include "Port_PCA9655E.h" | |||
| /* begin() is called from Scanner_IOE::begin(). Initiates I2C bus. | |||
| /* beginProtocol() is called from Scanner_IOE::begin(). Initiates I2C bus. | |||
| PCA9655E supports I2C SCL Clock Frequencies: 100 kHz, 400 kHz, 1000 kHz (Datasheet page 1 & 6) | |||
| The electrical limitation to bus speed is bus capacitance and the length of the wires involved. | |||
+ 15
- 5
src/Scanner_ShiftRegsPISOMultiRow.cpp
Ver arquivo
| @@ -16,6 +16,7 @@ Configures controller to communicate with shift register matrix. | |||
| void Scanner_ShiftRegsPISOMultiRow::init(const uint8_t strobePin) | |||
| { | |||
| pinMode(strobePin, OUTPUT); | |||
| //digitalWrite(strobePin, strobeOff);//todo is this needed? | |||
| } | |||
| /* begin() should be called once from sketch setup(). | |||
| @@ -23,7 +24,7 @@ Initializes shift register's shift/load pin. | |||
| */ | |||
| void Scanner_ShiftRegsPISOMultiRow::begin() | |||
| { | |||
| digitalWrite(slaveSelect, HIGH); | |||
| SPI.begin(); | |||
| } | |||
| /* scan() strobes the row's strobePin and returns state of the shift register's input pins. | |||
| @@ -34,16 +35,25 @@ read_pins_t Scanner_ShiftRegsPISOMultiRow::scan(const uint8_t strobePin) | |||
| { | |||
| read_pins_t readState = 0; //bits, 1 means key is pressed, 0 means released | |||
| //strobe row on | |||
| //strobe on | |||
| digitalWrite(strobePin, strobeOn); | |||
| delayMicroseconds(3); //time to stablize voltage | |||
| //SPI.beginTransaction( SPISettings(5000000, MSBFIRST, SPI_MODE0) ); //control SPI bus, 5 MHz | |||
| //digitalWrite(slaveSelect, LOW); //assert slave | |||
| delayMicroseconds(3); //time to stabilize photo-transistor todo needed? | |||
| delayMicroseconds(50); //todo for sr2_LEDs_strobe.ino | |||
| //read all the column pins | |||
| digitalWrite(slaveSelect, LOW); //load parallel inputs to the register | |||
| digitalWrite(slaveSelect, HIGH); //shift the data toward a serial output | |||
| SPI.transfer(&readState, byte_count); | |||
| digitalWrite(slaveSelect, LOW); //load parallel inputs to registers | |||
| //digitalWrite(slaveSelect, HIGH); //de-assert slave | |||
| //SPI.endTransaction(); | |||
| //strobe row off | |||
| //strobe off | |||
| digitalWrite(strobePin, strobeOff); | |||
| return readState; | |||
+ 2
- 3
src/Scanner_ShiftRegsPISOMultiRow.h
Ver arquivo
| @@ -9,7 +9,7 @@ | |||
| /* Scanner_ShiftRegsPISOMultiRow reads shift registers. | |||
| This was tested on 74HC165 shift registers, which are Parallel-In-Serial-Out (PISO). | |||
| Upto 4 shift registers can be in a daisy chained for a total of 32 read pins. | |||
| Shift registers can be daisy chained for a total of 32 read pins. | |||
| Example instantiation: | |||
| Scanner_ShiftRegsPISOMultiRow scanner_R(HIGH, SS, 4); | |||
| @@ -18,7 +18,6 @@ There are three Scanner_ShiftRegsPISOMultiRow parameters. | |||
| "strobeOn" paramter is active state HIGH or LOW. | |||
| "slaveSelect" paramter can be any controller pin connected to shift register's SHIFT-LOAD pin. | |||
| slaveSelect pin SS (Arduino pin 10) has the fastest scan. | |||
| "byte_count" is the number of bytes to read from shift registers (1 to 4). | |||
| byte_count should cover all the row's keys: | |||
| @@ -26,7 +25,7 @@ byte_count should cover all the row's keys: | |||
| Hardware setup: | |||
| Each row needs to be connected to a strobe pin from the controller. | |||
| Switche and diode in series are connected to shift-register parallel-input pins and strobed row. | |||
| Switch and diode in series, connect shift-register parallel-input pins to strobed row. | |||
| For active low: | |||
| Shift-register parallel-input pins need 10k Ohm pull-up resistors powered. | |||
+ 2
- 0
src/Scanner_ShiftRegsPISOSingleRow.cpp
Ver arquivo
| @@ -1,6 +1,7 @@ | |||
| #include "Scanner_ShiftRegsPISOSingleRow.h" | |||
| /* constructor | |||
| Parameter strobeOn is not used. | |||
| */ | |||
| Scanner_ShiftRegsPISOSingleRow::Scanner_ShiftRegsPISOSingleRow(const bool strobeOn, | |||
| const uint8_t slaveSelect, const uint8_t byte_count) | |||
| @@ -26,6 +27,7 @@ void Scanner_ShiftRegsPISOSingleRow::begin() | |||
| } | |||
| /* scan() returns state of the shift register's input pins. | |||
| Parameter strobePin is not used. | |||
| No strobe pin is needed, the shift register is wired so the strobe is effectivley always "on". | |||
| Bit patterns are 1 bit per key. | |||
| */ | |||
+ 2
- 2
src/Scanner_ShiftRegsPISOSingleRow.h
Ver arquivo
| @@ -22,7 +22,6 @@ There are three Scanner_ShiftRegsPISOSingleRow parameters. | |||
| "strobeOn" paramter is ignored, but should be active state HIGH or LOW required by ScannerInterface. | |||
| "slaveSelect" paramter can be any controller pin connected to shift register's SHIFT-LOAD pin. | |||
| slaveSelect pin SS (Arduino pin 10) has the fastest scan. | |||
| "byte_count" is the number of bytes to read from shift registers (1 to 4). | |||
| byte_count should cover all the row's keys: | |||
| @@ -30,7 +29,8 @@ byte_count should cover all the row's keys: | |||
| Hardware setup: | |||
| There is only one row, and it is permanently active. | |||
| Switches are connected to shift-register parallel-input pins (diodes are not needed) and row. | |||
| Switches are connected to shift-register parallel-input pins and row. | |||
| Diodes are not needed because there is only one row. | |||
| For active low: | |||
| Shift-register parallel-input pins need 10k Ohm pull-up resistors powered. | |||
BIN
tutorials/keybrd_3a_multi-layerHold/front.JPG
Ver arquivo
{kind=link}
+ 3
- 5
tutorials/keybrd_4b_split_keyboard_with_shift_registers/keybrd_4b_split_keyboard_with_shift_registers.ino
Ver arquivo
| @@ -3,7 +3,7 @@ Tested on Teensy LC and two 74HC165 shift registers. | |||
| Controller Two shift registers daisy chained | |||
| | Left |**0**| | Right |**0**|**1**|**2**|**3**|**4**|**5**|**6**| | |||
| |:-----:|-----| |:-----:|-----|-----|-----|-----|-----|-----|-----| | |||
| |-------|-----| |-------|-----|-----|-----|-----|-----|-----|-----| | |||
| | **0** | x | | **0** | 0 | 1 | 2 | 3 | 4 | 5 | 6 | | |||
| | **1** | y | | **1** | a | b | c | d | e | f | g | | |||
| */ | |||
| @@ -49,10 +49,8 @@ uint8_t readPinCount_L = sizeof(readPins_L)/sizeof(*readPins_L); | |||
| Scanner_uC scanner_L(LOW, readPins_L, readPinCount_L); //active LOW | |||
| /* --------------- RIGHT SCANNER --------------- | |||
| use slaveSelect pin SS (Arduino pin 10) for fastest scan | |||
| */ | |||
| Scanner_ShiftRegsPISOSingleRow scanner_R(HIGH, SS, 2); //active HIGH | |||
| // --------------- RIGHT SCANNER --------------- | |||
| Scanner_ShiftRegsPISOSingleRow scanner_R(HIGH, 10, 2); //active HIGH | |||
| // =================== ROWS ==================== | |||
| // ----------------- LEFT ROWS ----------------- | |||
+ 1
- 1
tutorials/keybrd_4c_split_keyboard_with_IOE/keybrd_4c_split_keyboard_with_IOE.ino
Ver arquivo
| @@ -6,7 +6,7 @@ This sketch: | |||
| Controller I/O expander | |||
| | Left | **0** | **1** | | Right | **0** | **1** | | |||
| |:-----:|-------|-------|-|:-----:|-------|-------| | |||
| |-------|-------|-------| |-------|-------|-------| | |||
| | **1** | 1 | 2 | | **1** | 3 | 4 | | |||
| | **0** | a | b | | **0** | c | d | | |||
| */ | |||
+ 6
- 6
tutorials/keybrd_5b_LED_on_IOE/keybrd_5b_LED_on_IOE.ino
Ver arquivo
| @@ -1,7 +1,7 @@ | |||
| /* keybrd_5b_LED_on_IOE.ino | |||
| This sketch: | |||
| is a simple 1-layer keyboard with CapsLck indicator LED on I/O expander | |||
| is a simple 1-layer keyboard with indicator LED on controller and 2 LEDs on I/O expander | |||
| runs on a two-matrix breadboard keyboard | |||
| modified keybrd_4c_split_keyboard_with_IOE.ino by adding LED_capsLck | |||
| @@ -10,8 +10,8 @@ This layout table shows left and right matrices: | |||
| Controller I/O expander | |||
| | Left | **0** | **1** | | Right | **0** | **1** | | |||
| |:-----:|-------|-------|-|:-----:|-------|-------| | |||
| | **1** |CapsLck| a 1 | | **1** | b 2 | c 3 | | |||
| | **0** | fn | x = | | **0** | y - | z / | | |||
| | **0** |CapsLck| a 1 | | **1** | b 2 | c 3 | | |||
| | **1** | fn | x = | | **0** | y - | z / | | |||
| */ | |||
| // ################## GLOBAL ################### | |||
| // ================= INCLUDES ================== | |||
| @@ -35,7 +35,7 @@ This layout table shows left and right matrices: | |||
| // ============ SPEED CONFIGURATION ============ | |||
| ScanDelay scanDelay(9000); | |||
| // ==================== IC ===================== | |||
| // ==================== ICs ==================== | |||
| // ---------------- LEFT SCANNER --------------- | |||
| uint8_t readPins[] = {14, 15}; | |||
| const uint8_t readPinCount = sizeof(readPins)/sizeof(*readPins); | |||
| @@ -47,8 +47,8 @@ LED_uC LED_capsLck(21); | |||
| // --------------- RIGHT SCANNER --------------- | |||
| const uint8_t IOE_ADDR = 0x20; //MCP23S17 address, all 3 ADDR pins are grounded | |||
| Port_MCP23S17 portA(IOE_ADDR, 0, 1<<0 | 1<<1 ); //for read and LED | |||
| Port_MCP23S17 portB(IOE_ADDR, 1, 0); //for strobe and LED | |||
| Port_MCP23S17 portA(IOE_ADDR, 0, 1<<0 | 1<<1 ); //for read | |||
| Port_MCP23S17 portB(IOE_ADDR, 1, 0); //for strobe | |||
| Scanner_IOE scanner_R(LOW, portB, portA); | |||
+ 7
- 7
tutorials/tutorial_1_breadboard_keyboard.md
Ver arquivo
| @@ -43,21 +43,21 @@ These are explained in [How to Use a Breadboard](https://learn.sparkfun.com/tuto | |||
| Electrostatic discharge (ESD) safety | |||
| ------------------------------------ | |||
| Static electricity can damage a microcontroller in ways that are hard to trouble shoot. | |||
| Static electricity can damage a ICs in ways that are hard to trouble shoot. | |||
| I live in a desert on a carpeted floor and get zapped by door knobs regularly. | |||
| Here is the ESD precaution I take whenever I handle a microcontroller: | |||
| Here is a ESD precaution for handling ICs: | |||
| 1. Touch the bare metal on the back of my desktop computer (its grounded). | |||
| 2. Then touch the metal USB connector case on the microcontroller. | |||
| Anti-static mat or anti-static wristband are also effective. | |||
| Being tethered by an anti-static wristband can be inconvenient (wireless antistatic wrist straps are a scam). | |||
| 2. Then touch the IC or circuit (if its a micro-controller, touch the metal USB connector case). | |||
| I take these ESD precaution because I live in a dry environment on a carpeted floor. | |||
| Not everyone needs to take ESD precautions: | |||
| * http://forum.arduino.cc/index.php?topic=4643.0 | |||
| * https://forums.adafruit.com/viewtopic.php?f=8&t=12128 | |||
| Anti-static mat or anti-static wristband are also effective. | |||
| But being tethered by an anti-static wristband can be inconvenient (wireless antistatic wrist straps are a scam). | |||
| Building a basic breadboard keyboard | |||
| ------------------------------------ | |||
| The basic breadboard keyboard has 4 switches. | |||
+ 3
- 1
tutorials/tutorial_2_single-layer_keyboard.md
Ver arquivo
| @@ -20,7 +20,9 @@ The scanner should have enough readPins to cover all the keys of the longest row | |||
| | Layout |**0**|**1**|**2**| | |||
| |:------:|:---:|:---:|:---:| | |||
| | **0** | 1 | 2 | 3 | | |||
| | **1** | a | b | | |||
| | **1** | a | b | | | |||
| [keybrd tutorials usability survey](../CONTRIBUTING.md##keybrd-tutorials-usability-survey) | |||
| <br> | |||
| <a rel="license" href="https://creativecommons.org/licenses/by/4.0/"><img alt="Creative Commons License" style="border-width:0" src="https://licensebuttons.net/l/by/4.0/88x31.png" /></a><br /><span xmlns:dct="http://purl.org/dc/terms/" property="dct:title">keybrd tutorial</span> by <a xmlns:cc="https://creativecommons.org/ns" href="https://github.com/wolfv6/keybrd" property="cc:attributionName" rel="cc:attributionURL">Wolfram Volpi</a> is licensed under a <a rel="license" href="https://creativecommons.org/licenses/by/4.0/">Creative Commons Attribution 4.0 International License</a>.<br />Permissions beyond the scope of this license may be available at <a xmlns:cc="https://creativecommons.org/ns" href="https://github.com/wolfv6/keybrd/issues/new" rel="cc:morePermissions">https://github.com/wolfv6/keybrd/issues/new</a>. | |||
+ 5
- 4
tutorials/tutorial_4_connecting_split_keyboards.md
Ver arquivo
| @@ -28,9 +28,10 @@ But if there are enough pins on the controller, using just a cable with more wir | |||
| I/O Expanders can power LEDs, while PISO shift registers can not. | |||
| I2C is a little slow if the I/O expander is scanning more than 4 rows. | |||
| The keybrd_DH (DodoHand) sketch polls 5 rows over I2C at 7.5ms per keyboard scan. | |||
| Which is acceptable, but faster would be nicer. | |||
| I2C is fast enough for scanning up to 5 rows. | |||
| SPI is much faster, but requires 2 additional wires. | |||
| More scanning options are reviewed at http://www.openmusiclabs.com/learning/digital/input-matrix-scanning/ | |||
| ## Cables table | |||
| @@ -52,7 +53,7 @@ There are also wireless options if you don't mind adding complexity and maintain | |||
| The 8-wire "GearIT Cat 6 Ethernet Flat Patch Cable 7 Feet" is very flexible. | |||
| It's available at Walmart (9/19/16) if you want to feel the merchandise before you buy. | |||
| All the modular connectors are flat. | |||
| All the modular connector cables are available in the flat form factor. | |||
| For prototyping on perfboards, consider a 0.1" header. | |||
+ 2
- 2
tutorials/tutorial_4b_split_keyboard_with_shift_registers.md
Ver arquivo
| @@ -36,7 +36,7 @@ This table lists what gets connected to the 74HC165 pins: | |||
| **74HC165 left (lower half of breadboard)** | |||
| |NAME |PIN#|DESCRIPTION |TO TEENSY LC PIN#|CHAIN | | |||
| |--------|:--:|--------------------|-----------------|-----------| | |||
| |:-------|:--:|:-------------------|:----------------|:----------| | |||
| |SH/LD |1 |shift or load input |CS0 10 |green wire | | |||
| |CLK |2 |clock input |SCK0 13 |yellow wire| | |||
| | D4 |3 |parallel input | | | | |||
| @@ -49,7 +49,7 @@ This table lists what gets connected to the 74HC165 pins: | |||
| **74HC165 right (upper half of breadboard)** | |||
| |NAME |PIN#|DESCRIPTION |TO TEENSY LC PIN#|CHAIN | | |||
| |--------|:--:|--------------------|-----------------|-------------------------| | |||
| |:-------|:--:|:-------------------|:----------------|:------------------------| | |||
| |VCC |16 |power pin |3.3V |red wire | | |||
| |CLK INH |15 |clock inhibit | |blue bus | | |||
| | D3 |14 |parallel input | | | | |||
+ 25
- 0
tutorials/tutorial_4c_split_keyboard_with_IOE.md
Ver arquivo
| @@ -17,6 +17,31 @@ Two rows (red buses) are connected to the I/O expander. | |||
|  | |||
| I/O expanders | |||
| ------------- | |||
| The MCP23S17 I/O expander has two ports with 8 I/O pins each. | |||
| I/O expander input/output pins are connected to a switch matrix. | |||
| Port B strobes one row at a time. | |||
| Port A reads the columns. | |||
| SPI and I2C communication protocols | |||
| ----------------------------------- | |||
| SPI and I2C are popular communication protocols. | |||
| Either one can be used to connect split keyboards. | |||
| I2C is fast enough for scanning up to 5 rows. | |||
| The keybrd_DH (DodoHand) sketch polls 5 rows over I2C at 7.5ms per keyboard scan. | |||
| SPI is much faster, but requires 2 additional wires. | |||
| Use SPI if your key matrix has more then 5 rows. | |||
| | connection type | controller pins | wire count | | |||
| |------------------------|:---------------:|:----------:| | |||
| | I/O expander SPI | 4 | 6 | | |||
| | I/O expander I2C | 2 | 4 | | |||
| The example in this tutorial uses the SPI protocol. | |||
| Building a split keyboard with I/O Expander | |||
| ------------------------------------------- | |||
| Starting with the basic breadboard keyboard described in [tutorial_1_breadboard_keyboard.md](tutorial_1_breadboard_keyboard.md), add parts as described above. | |||
+ 1
- 1
tutorials/tutorial_5a_LED_on_uC.md
Ver arquivo
| @@ -39,7 +39,7 @@ Less resistance makes the LED brighter. | |||
| Too little resistance will burn out the LED. | |||
| The current supplied to an LED should always be limited by a resistor or some other device. | |||
| LED current limiting resistor values | |||
| LED current-limiting resistor values | |||
| ------------------------------------ | |||
| In the section we will compute the minimum resistor value for maximum LED brightness. | |||
+ 1
- 1
tutorials/tutorial_5b_LED_on_IOE.md
Ver arquivo
| @@ -26,7 +26,7 @@ keybrd sketch with LEDs on IOE | |||
| ------------------------------ | |||
| The [keybrd_5b_LED_on_IOE.ino](keybrd_5b_LED_on_IOE/keybrd_5b_LED_on_IOE.ino) sketch will run on the above breadboard keyboard. | |||
| The sketch features: | |||
| The sketch demonstrates: | |||
| * multiple layers | |||
| * split keyboard | |||
| * LED on controller | |||
+ 33
- 0
unit_tests/PortMCP23018_write/PortMCP23018_write.ino
Ver arquivo
| @@ -0,0 +1,33 @@ | |||
| /* unit test for Port_MCP23018 | |||
| Picture of hardware is in unit_tests/PortMCP23018_read/PortMCP23018_bb.JPG todo | |||
| The setup is an MCP23018 I/O expander on a Teensy LC controller. | |||
| MCP23018 port-A GPIO pins are not connected to anything. | |||
| Port-A GPIO-pin ouputs alternate between 0 and 3.3 volts. | |||
| volt meter between pin A1 and power because | |||
| MCP23018 has open-drain outputs (open-drain can only sink current) | |||
| Use a volt meter to measure port-A GPIO-pin outputs or red LED. | |||
| */ | |||
| #include "Port_MCP23018.h" | |||
| const uint8_t IOE_ADDR = 0x20; //MCP23018 address ADDR pin grounded | |||
| Port_MCP23018 portA(IOE_ADDR, 0, 0); | |||
| void setup() | |||
| { | |||
| delay(6000); | |||
| Keyboard.println("PortMCP23018_write.ino"); | |||
| portA.beginProtocol(); | |||
| portA.begin(LOW); //HIGH or LOW, not matter if readPins=0 | |||
| } | |||
| void loop() | |||
| { | |||
| portA.write(~0, HIGH); //set all GPIOA pins HIGH | |||
| Keyboard.print("+"); | |||
| delay(2000); | |||
| portA.write(~0, LOW); //set all GPIOA pins LOW | |||
| Keyboard.print("0"); | |||
| delay(2000); | |||
| } | |||
+ 8
- 12
unit_tests/PortMCP23S17_read/PortMCP23S17_read.ino
Ver arquivo
| @@ -2,28 +2,24 @@ | |||
| Picture of hardware is in unit_tests/PortMCP23S17_read/PortMCP23S17_bb.JPG | |||
| The setup is an MCP23S17 I/O expander on a Teensy LC controller. | |||
| MCP23S17 port-B pins are alternately grounded and energized. | |||
| portBState is a bitwise reading of port B. | |||
| output is: 10101010 | |||
| */ | |||
| #include "PortIOE.h" | |||
| #include "PortMCP23S17.h" | |||
| #include "Port_MCP23S17.h" | |||
| const uint8_t PortIOE::DEVICE_ADDR = 0x20; //MCP23S17 address, all 3 ADDR pins are grounded | |||
| PortIOE portB(1); | |||
| PortMCP23S17 portBRead(portB, ~0); | |||
| const uint8_t IOE_ADDR = 0x20; //MCP23S17 address, all 3 ADDR pins grounded | |||
| Port_MCP23S17 portB(IOE_ADDR, 1, ~0); //read all pins | |||
| void setup() | |||
| { | |||
| uint8_t portBState; //bit pattern | |||
| uint8_t BitPattern; //reading of port B | |||
| delay(6000); | |||
| portBRead.begin(HIGH); //HIGH or LOW, not matter | |||
| portB.begin(HIGH); //HIGH or LOW, does not matter | |||
| portBState = portBRead.read(); | |||
| Keyboard.print("portBState = "); | |||
| Keyboard.println(portBState, BIN); //prints 10101010 | |||
| BitPattern = portB.read(); | |||
| Keyboard.print("BitPattern = "); | |||
| Keyboard.println(BitPattern, BIN); //prints 10101010 | |||
| } | |||
| void loop() { } | |||
+ 10
- 15
unit_tests/PortMCP23S17_write/PortMCP23S17_write.ino
Ver arquivo
| @@ -1,34 +1,29 @@ | |||
| /* unit test for PortMCP23S17 | |||
| /* unit test for Port_MCP23S17 | |||
| Picture of hardware is in unit_tests/PortMCP23S17_read/PortMCP23S17_bb.JPG | |||
| The setup is an MCP23S17 I/O expander on a Teensy LC controller. | |||
| MCP23S17 port-A GPIO pins are not connected to anything. | |||
| Port-A GPIO-pin ouputs alternate between 0 and 3.3 volts. | |||
| Use a volt meter to measure port-A GPIO-pin outputs. | |||
| OR low-voltage LED, with forward voltage less than 2 volts. | |||
| Use a volt meter to measure port-A GPIO-pin outputs or red LED. | |||
| */ | |||
| #include "PortIOE.h" | |||
| #include "PortMCP23S17.h" | |||
| #include "Port_MCP23S17.h" | |||
| const uint8_t PortIOE::DEVICE_ADDR = 0x20; //MCP23S17 address, all 3 ADDR pins are grounded | |||
| PortIOE portA(0); | |||
| PortMCP23S17 portAWrite(portA, 0); //PortAWrite needed for begin() | |||
| //const uint8_t GPIOA = 0x12; //LEDs are on port A | |||
| const uint8_t IOE_ADDR = 0x20; //MCP23S17 address, all 3 ADDR pins grounded | |||
| Port_MCP23S17 portA(IOE_ADDR , 0, 0); //PortAWrite needed for begin() | |||
| void setup() | |||
| { | |||
| delay(6000); | |||
| portAWrite.begin(LOW); //HIGH or LOW, not matter if readPins=0 | |||
| Keyboard.print("start writing"); | |||
| Keyboard.println("start setup"); | |||
| portA.begin(LOW); //HIGH or LOW, not matter if readPins=0 | |||
| Keyboard.println("start loop"); | |||
| } | |||
| void loop() | |||
| { | |||
| portAWrite.write(~0, HIGH); //set all GPIOA pins HIGH | |||
| portA.write(~0, HIGH); //set all GPIOA pins HIGH | |||
| delay(2000); | |||
| portAWrite.write(~0, LOW); //set all GPIOA pins LOW | |||
| portA.write(~0, LOW); //set all GPIOA pins LOW | |||
| delay(2000); | |||
| } | |||