wolfv6
8 年前
wolfv6
8 年前
+ 45
- 36
examples/keybrd_shift_register/keybrd_shift_register.ino
查看文件
| with every 4th input pin connected to a pull-down resistor and matrix column, also the 31st key. | with every 4th input pin connected to a pull-down resistor and matrix column, also the 31st key. | ||||
| Unused input pins are not grounded, so add this line to RowScanner_SPIShiftRegisters::scan(): | Unused input pins are not grounded, so add this line to RowScanner_SPIShiftRegisters::scan(): | ||||
| //clear unpowered pins (for testing on breadboard) | //clear unpowered pins (for testing on breadboard) | ||||
| rowState &= 0b01010001000100010001000100010001; | |||||
| rowState &= 0b11110001000100010001000100010001; //todo | |||||
| Layout | Layout | ||||
| | Left |**0**|**1**| | Right |**0**|**1**|**2**|**3**|**4**|**5**|**6**|**7**|**8**| | |||||
| |:-----:|-----|-----| |:-----:|-----|-----|-----|-----|-----|-----|-----|-----|-----| | |||||
| | **0** | a | b | | **0** | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | | |||||
| | **1** | c | d | | **1** | a | b | c | d | e | f | g | h | i | | |||||
| | Left | **0**|**1**| | Right |**0**|**1**|**2**|**3**|**4**|**5**|**6**|**7**|**8**| | |||||
| |:-----:|------|-----| |:-----:|-----|-----|-----|-----|-----|-----|-----|-----|-----| | |||||
| | **0** |capLck| a | | **0** | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | | |||||
| | **1** | b | c | | **1** | a | b | c | d | e | f | g | h | i | | |||||
| */ | */ | ||||
| // ################## GLOBAL ################### | // ################## GLOBAL ################### | ||||
| // ================= INCLUDES ================== | // ================= INCLUDES ================== | ||||
| #include <Debug.h> | #include <Debug.h> | ||||
| #include <ScanDelay.h> | #include <ScanDelay.h> | ||||
| #include <LED_PinNumber.h> | |||||
| //Codes | //Codes | ||||
| #include <Code_Sc.h> | #include <Code_Sc.h> | ||||
| #include <Code_LEDLock.h> | |||||
| //Matrix | //Matrix | ||||
| #include <Row_uC.h> | #include <Row_uC.h> | ||||
| // ================= LEFT PINS ================= | // ================= LEFT PINS ================= | ||||
| uint8_t readPins[] = {14, 15}; | uint8_t readPins[] = {14, 15}; | ||||
| uint8_t READ_PIN_COUNT = sizeof(readPins)/sizeof(*readPins); | |||||
| uint8_t KEY_COUNT = sizeof(readPins)/sizeof(*readPins); | |||||
| // ==================== LEDs =================== | |||||
| LED_PinNumber LED1(16); | |||||
| //sometimes OS takes 6 seconds to recongnize keyboard, LED blinks from the begining | |||||
| void wait() | |||||
| { | |||||
| for (uint8_t count = 0; count < 6; count++) | |||||
| { | |||||
| //print count | |||||
| Keyboard.print(count); | |||||
| Keyboard.print(F(" ")); | |||||
| //blink LED | |||||
| LED1.on(); | |||||
| delay(500); | |||||
| LED1.off(); | |||||
| delay(500); | |||||
| } | |||||
| } | |||||
| // =================== CODES =================== | // =================== CODES =================== | ||||
| Code_Sc s_a(KEY_A); | Code_Sc s_a(KEY_A); | ||||
| Code_Sc s_b(KEY_B); | Code_Sc s_b(KEY_B); | ||||
| Code_Sc s_h(KEY_H); | Code_Sc s_h(KEY_H); | ||||
| Code_Sc s_i(KEY_I); | Code_Sc s_i(KEY_I); | ||||
| Code_Sc s_u(KEY_U); | |||||
| Code_Sc s_v(KEY_V); | |||||
| Code_Sc s_w(KEY_W); | |||||
| Code_Sc s_x(KEY_X); | |||||
| Code_Sc s_z(KEY_Z); | |||||
| Code_Sc s_0(KEY_0); | Code_Sc s_0(KEY_0); | ||||
| Code_Sc s_1(KEY_1); | Code_Sc s_1(KEY_1); | ||||
| Code_Sc s_2(KEY_2); | Code_Sc s_2(KEY_2); | ||||
| Code_Sc s_6(KEY_6); | Code_Sc s_6(KEY_6); | ||||
| Code_Sc s_7(KEY_7); | Code_Sc s_7(KEY_7); | ||||
| Code_Sc s_8(KEY_8); | Code_Sc s_8(KEY_8); | ||||
| Code_Sc s_z(KEY_Z); | |||||
| Code_LEDLock o_capsLock(KEY_CAPS_LOCK, LED1); | |||||
| // ================= LEFT ROWS ================= | // ================= LEFT ROWS ================= | ||||
| Key* ptrsKeys_L0[] = { &s_a, &s_b }; | |||||
| Row_uC row_L0(0, readPins, READ_PIN_COUNT, ptrsKeys_L0); | |||||
| Key* ptrsKeys_L0[] = { &o_capsLock, &s_a }; | |||||
| Row_uC row_L0(0, readPins, ptrsKeys_L0, KEY_COUNT); | |||||
| Key* ptrsKeys_L1[] = { &s_c, &s_d }; | |||||
| Row_uC row_L1(1, readPins, READ_PIN_COUNT, ptrsKeys_L1); | |||||
| Key* ptrsKeys_L1[] = { &s_b, &s_c }; | |||||
| Row_uC row_L1(1, readPins, ptrsKeys_L1, KEY_COUNT); | |||||
| // ================= RIGHT ROWS ================ | // ================= RIGHT ROWS ================ | ||||
| //typedef should be large in /home/wolfv/Documents/Arduino/keybrd_proj/keybrd/src/config_keybrd.h | //typedef should be large in /home/wolfv/Documents/Arduino/keybrd_proj/keybrd/src/config_keybrd.h | ||||
| Row_ShiftRegisters row_R0(8, ptrsKeys_R0, KEY_R0_COUNT); | Row_ShiftRegisters row_R0(8, ptrsKeys_R0, KEY_R0_COUNT); | ||||
| */ | */ | ||||
| //prints 0 1 2 3 4 5 6 7 8, microseconds_per_scan=87 with SAMPLE_COUNT 4 | |||||
| //prints 0 1 2 3 3 4 5 6, microseconds_per_scan=87 with SAMPLE_COUNT 4 | |||||
| Key* ptrsKeys_R0[] = { &s_0, &s_z, &s_z, &s_z, &s_1, &s_z, &s_z, &s_z, | Key* ptrsKeys_R0[] = { &s_0, &s_z, &s_z, &s_z, &s_1, &s_z, &s_z, &s_z, | ||||
| &s_2, &s_z, &s_z, &s_z, &s_3, &s_z, &s_z, &s_z, | &s_2, &s_z, &s_z, &s_z, &s_3, &s_z, &s_z, &s_z, | ||||
| &s_4, &s_z, &s_z, &s_z, &s_5, &s_z, &s_z, &s_z, | &s_4, &s_z, &s_z, &s_z, &s_5, &s_z, &s_z, &s_z, | ||||
| &s_6, &s_z, &s_z, &s_z, &s_7, &s_z, &s_8 }; //31-key limit because endRow | |||||
| &s_6, &s_z, &s_z, &s_z, &s_3, &s_4, &s_5, &s_6 }; | |||||
| const uint8_t KEY_R0_COUNT = sizeof(ptrsKeys_R0)/sizeof(*ptrsKeys_R0); | const uint8_t KEY_R0_COUNT = sizeof(ptrsKeys_R0)/sizeof(*ptrsKeys_R0); | ||||
| Row_ShiftRegisters row_R0(8, ptrsKeys_R0, KEY_R0_COUNT); | Row_ShiftRegisters row_R0(8, ptrsKeys_R0, KEY_R0_COUNT); | ||||
| //prints a b c d e f g h i | |||||
| //prints a b c d u v w x | |||||
| Key* ptrsKeys_R1[] = { &s_a, &s_z, &s_z, &s_z, &s_b, &s_z, &s_z, &s_z, | Key* ptrsKeys_R1[] = { &s_a, &s_z, &s_z, &s_z, &s_b, &s_z, &s_z, &s_z, | ||||
| &s_c, &s_z, &s_z, &s_z, &s_d, &s_z, &s_z, &s_z, | &s_c, &s_z, &s_z, &s_z, &s_d, &s_z, &s_z, &s_z, | ||||
| &s_e, &s_z, &s_z, &s_z, &s_f, &s_z, &s_z, &s_z, | &s_e, &s_z, &s_z, &s_z, &s_f, &s_z, &s_z, &s_z, | ||||
| &s_g, &s_z, &s_z, &s_z, &s_h, &s_z, &s_i }; //31-key limit because endRow | |||||
| &s_g, &s_z, &s_z, &s_z, &s_u, &s_v, &s_w, &s_x }; | |||||
| const uint8_t KEY_R1_COUNT = sizeof(ptrsKeys_R1)/sizeof(*ptrsKeys_R1); | const uint8_t KEY_R1_COUNT = sizeof(ptrsKeys_R1)/sizeof(*ptrsKeys_R1); | ||||
| Row_ShiftRegisters row_R1(9, ptrsKeys_R1, KEY_R1_COUNT); | Row_ShiftRegisters row_R1(9, ptrsKeys_R1, KEY_R1_COUNT); | ||||
| const uint8_t LED_PIN = 16; //indicates wait | |||||
| //sometimes OS takes 6 seconds to recongnize keyboard, LED blinks from the begining | |||||
| void wait() | |||||
| { | |||||
| for (uint8_t count = 0; count < 6; count++) | |||||
| { | |||||
| //print count | |||||
| Keyboard.print(count); | |||||
| Keyboard.print(F(" ")); | |||||
| //blink LED | |||||
| digitalWrite(LED_PIN, HIGH); | |||||
| delay(900); | |||||
| digitalWrite(LED_PIN, LOW); | |||||
| delay(100); | |||||
| } | |||||
| } | |||||
| // ################### MAIN #################### | // ################### MAIN #################### | ||||
| void setup() | void setup() | ||||
| { | { | ||||
| pinMode (LED_PIN, OUTPUT); | |||||
| Keyboard.begin(); | Keyboard.begin(); | ||||
| wait(); | wait(); | ||||
| row_R0.begin(); | row_R0.begin(); | ||||
| row_R1.begin(); | row_R1.begin(); | ||||
| Keyboard.print(F("keybrd_shift_reg.ino ")); | |||||
| debug.print_free_RAM(); | |||||
| Keyboard.println(F("keybrd_shift_reg.ino")); | |||||
| } | } | ||||
| void loop() | void loop() |
+ 1
- 1
src/Code_LEDLock.cpp
查看文件
| */ | */ | ||||
| if (keyboard_leds & USB_LED_bit) //if USB_LED_bit is set | if (keyboard_leds & USB_LED_bit) //if USB_LED_bit is set | ||||
| { | { | ||||
| refLED.off(); //LED on-off seem inverted, but it works for active high | |||||
| refLED.off(); //LED on-off seem inverted, but it works for active low and active high | |||||
| } | } | ||||
| else | else | ||||
| { | { |
+ 1
- 2
src/ColPort_PCA9655E.cpp
查看文件
| /* | /* | ||||
| configures column port's configuration, input, and pins. | configures column port's configuration, input, and pins. | ||||
| */ | */ | ||||
| ColPort_PCA9655E::ColPort_PCA9655E | |||||
| (IOExpanderPort& port, const uint8_t colPins) | |||||
| ColPort_PCA9655E::ColPort_PCA9655E (IOExpanderPort& port, const uint8_t colPins) | |||||
| : ColPort(colPins), port(port), configurationByteCommand(port.num + 6), inputByteCommand(port.num) | : ColPort(colPins), port(port), configurationByteCommand(port.num + 6), inputByteCommand(port.num) | ||||
| {} | {} | ||||
+ 0
- 8
src/Debug.cpp
查看文件
| #include "Debug.h" | #include "Debug.h" | ||||
| #include "getFreeSRAM.h" | |||||
| void Debug::print_free_RAM() | |||||
| { | |||||
| delay(1000); //give OS time to find USB | |||||
| Keyboard.print(F("Free SRAM = ")); | |||||
| Keyboard.println( getFreeSRAM() ); | |||||
| } | |||||
| void Debug::print_microseconds_per_scan() | void Debug::print_microseconds_per_scan() | ||||
| { | { |
+ 0
- 1
src/Debug.h
查看文件
| unsigned int scanCount = 0; | unsigned int scanCount = 0; | ||||
| public: | public: | ||||
| void print_free_RAM(); //print free SRAM, call this from setup() | |||||
| void print_microseconds_per_scan(); //print microseconds per scan every second | void print_microseconds_per_scan(); //print microseconds per scan every second | ||||
| void print_scans_per_second(); //print scans per second every second | void print_scans_per_second(); //print scans per second every second | ||||
| }; | }; |
+ 1
- 2
src/RowBase.cpp
查看文件
| /* | /* | ||||
| pressRelease() calls key's press() or release() function if it was pressed or released. | pressRelease() calls key's press() or release() function if it was pressed or released. | ||||
| Both parameters are bitwise. | Both parameters are bitwise. | ||||
| rowEnd bit marks positioned immediatly after last key of row. | |||||
| */ | */ | ||||
| void RowBase::pressRelease(const uint8_t KEY_COUNT, const read_pins_t debouncedChanged) | void RowBase::pressRelease(const uint8_t KEY_COUNT, const read_pins_t debouncedChanged) | ||||
| { | { | ||||
| read_pins_t isFallingEdge; //bitwise, 1 means falling edge | read_pins_t isFallingEdge; //bitwise, 1 means falling edge | ||||
| read_pins_t isRisingEdge; //bitwise, 1 means rising edge | read_pins_t isRisingEdge; //bitwise, 1 means rising edge | ||||
| read_pins_mask_t rowMask; //bitwise, active col bit is 1 | |||||
| read_pins_t rowMask; //bitwise, active col bit is 1 | |||||
| uint8_t col; //index for ptrsKeys[col] array | uint8_t col; //index for ptrsKeys[col] array | ||||
| //bit=1 if last debounced changed from 1 to 0, else bit=0 | //bit=1 if last debounced changed from 1 to 0, else bit=0 |
+ 1
- 1
src/RowBase.h
查看文件
| virtual void keyWasPressed(); | virtual void keyWasPressed(); | ||||
| protected: | protected: | ||||
| read_pins_t debounced; //bitwise, 1 means pressed, 0 means released | read_pins_t debounced; //bitwise, 1 means pressed, 0 means released | ||||
| void pressRelease(const read_pins_mask_t rowEnd, const read_pins_t debouncedChanged); | |||||
| void pressRelease(const uint8_t KEY_COUNT, const read_pins_t debouncedChanged); | |||||
| public: | public: | ||||
| RowBase(Key *const ptrsKeys[]) : ptrsKeys(ptrsKeys), debounced(0) { } | RowBase(Key *const ptrsKeys[]) : ptrsKeys(ptrsKeys), debounced(0) { } | ||||
| virtual void process()=0; | virtual void process()=0; |
+ 7
- 9
src/RowScanner_PinsArray.cpp
查看文件
| } | } | ||||
| /* scan() Strobes the row and reads the columns. | /* scan() Strobes the row and reads the columns. | ||||
| Sets rowEnd and returns rowState. | |||||
| rowEnd is a bitwise row mask, one col per bit, where active col bit is 1. | |||||
| At end of function, 1 bit marks place immediatly after last key of row. | |||||
| rowEnd is a larger type than portMask so that it can not overflow. | |||||
| Sets KEY_COUNT and returns rowState. | |||||
| https://www.arduino.cc/en/Tutorial/DigitalPins | https://www.arduino.cc/en/Tutorial/DigitalPins | ||||
| https://www.arduino.cc/en/Reference/PinMode | https://www.arduino.cc/en/Reference/PinMode | ||||
| https://www.arduino.cc/en/Reference/DigitalRead | https://www.arduino.cc/en/Reference/DigitalRead | ||||
| https://www.arduino.cc/en/Reference/Constants > Digital Pins modes: INPUT, INPUT_PULLUP, and OUTPUT | https://www.arduino.cc/en/Reference/Constants > Digital Pins modes: INPUT, INPUT_PULLUP, and OUTPUT | ||||
| */ | */ | ||||
| read_pins_t RowScanner_PinsArray::scan(read_pins_mask_t& rowEnd) | |||||
| read_pins_t RowScanner_PinsArray::scan(uint8_t& keyCount) | |||||
| { | { | ||||
| read_pins_t rowState = 0; //bitwise | |||||
| rowEnd = 1; | |||||
| read_pins_t rowState = 0; //bitwise, one col per bit, 1 means key is pressed | |||||
| read_pins_t rowMask = 1; //bitwise, one col per bit, active col bit is 1 | |||||
| //strobe row on | //strobe row on | ||||
| if (ACTIVE_HIGH) | if (ACTIVE_HIGH) | ||||
| { | { | ||||
| if ( digitalRead(READ_PINS[i]) == ACTIVE_HIGH ) | if ( digitalRead(READ_PINS[i]) == ACTIVE_HIGH ) | ||||
| { | { | ||||
| rowState |= rowEnd; | |||||
| rowState |= rowMask; | |||||
| } | } | ||||
| rowEnd <<= 1; | |||||
| rowMask <<= 1; | |||||
| } | } | ||||
| //strobe row off | //strobe row off | ||||
| digitalWrite(STROBE_PIN, HIGH); | digitalWrite(STROBE_PIN, HIGH); | ||||
| } | } | ||||
| keyCount = READ_PIN_COUNT; | |||||
| return rowState; | return rowState; | ||||
| } | } |
+ 2
- 4
src/RowScanner_PinsArray.h
查看文件
| #include <ColPort.h> | #include <ColPort.h> | ||||
| /* RowScanner_PinsArray class uses Arduino pin numbers (not port pin numbers). | /* RowScanner_PinsArray class uses Arduino pin numbers (not port pin numbers). | ||||
| The maximum keys per row is 31, because Arduino's largest type is 32 bits and rowEnd consumes the last bit. | |||||
| Constructor is in RowScanner_PinsArray.cpp | Constructor is in RowScanner_PinsArray.cpp | ||||
| */ | */ | ||||
| class RowScanner_PinsArray | class RowScanner_PinsArray | ||||
| const uint8_t READ_PIN_COUNT; //number of read pins | const uint8_t READ_PIN_COUNT; //number of read pins | ||||
| public: | public: | ||||
| RowScanner_PinsArray(const uint8_t STROBE_PIN, | RowScanner_PinsArray(const uint8_t STROBE_PIN, | ||||
| const uint8_t READ_PINS[], const uint8_t READ_PIN_COUNT); | |||||
| virtual read_pins_t scan(read_pins_mask_t& rowEnd); | |||||
| //read_pins_t getRowState(read_pins_mask_t& rowEnd); | |||||
| const uint8_t READ_PINS[], const uint8_t READ_PIN_COUNT); //todo rename READ_PIN_COUNT to KEY_COUNT ?? | |||||
| virtual read_pins_t scan(uint8_t& KEY_COUNT); | |||||
| }; | }; | ||||
| #endif | #endif | ||||
+ 0
- 2
src/RowScanner_PinsBitwise.cpp
查看文件
| #include "RowScanner_PinsBitwise.h" | #include "RowScanner_PinsBitwise.h" | ||||
| /* | /* | ||||
| Strobes the row and reads the columns. | Strobes the row and reads the columns. | ||||
| Sets rowEnd and returns rowState. | |||||
| */ | */ | ||||
| ColPort* const RowScanner_PinsBitwise::scan() | ColPort* const RowScanner_PinsBitwise::scan() | ||||
| { | { | ||||
| refRowPort.setActivePinHigh(strobePin); | refRowPort.setActivePinHigh(strobePin); | ||||
| } | } | ||||
| // return getRowState(refColPort, rowEnd); | |||||
| return &refColPort; | return &refColPort; | ||||
| } | } |
+ 6
- 6
src/RowScanner_SPIShiftRegisters.cpp
查看文件
| //constructor | //constructor | ||||
| RowScanner_SPIShiftRegisters::RowScanner_SPIShiftRegisters(const uint8_t STROBE_PIN, uint8_t KEY_COUNT) | RowScanner_SPIShiftRegisters::RowScanner_SPIShiftRegisters(const uint8_t STROBE_PIN, uint8_t KEY_COUNT) | ||||
| : STROBE_PIN(STROBE_PIN), ROW_END(1 << KEY_COUNT), BYTE_COUNT(ceil (float(KEY_COUNT)/8)) | |||||
| : STROBE_PIN(STROBE_PIN), BYTE_COUNT(ceil (float(KEY_COUNT)/8)), KEY_COUNT(KEY_COUNT) | |||||
| { | { | ||||
| //configure controller to communicate with shift register matrix | //configure controller to communicate with shift register matrix | ||||
| pinMode(STROBE_PIN, OUTPUT); | pinMode(STROBE_PIN, OUTPUT); | ||||
| } | } | ||||
| /* | /* | ||||
| Sets rowEnd and returns rowState. | |||||
| Sets keyCount and returns rowState. | |||||
| */ | */ | ||||
| read_pins_t RowScanner_SPIShiftRegisters::scan(read_pins_mask_t& rowEnd) | |||||
| read_pins_t RowScanner_SPIShiftRegisters::scan(uint8_t& keyCount) | |||||
| { | { | ||||
| read_pins_t rowState = 0; | read_pins_t rowState = 0; | ||||
| //strobe row off | //strobe row off | ||||
| digitalWrite(STROBE_PIN, LOW); | digitalWrite(STROBE_PIN, LOW); | ||||
| rowEnd = ROW_END; | |||||
| keyCount = KEY_COUNT; | |||||
| //for testing breadboard, clear unpowered pins | |||||
| rowState &= 0b01010001000100010001000100010001; //todo | |||||
| //for testing on breadboard, clear unpowered pins | |||||
| rowState &= 0b11110001000100010001000100010001; //todo | |||||
| return rowState; | return rowState; | ||||
| } | } |
+ 2
- 3
src/RowScanner_SPIShiftRegisters.h
查看文件
| call begin() from setup() | call begin() from setup() | ||||
| Upto 4 shift registers can be in a daisy chained. | Upto 4 shift registers can be in a daisy chained. | ||||
| The maximum keys per row is 31, because Arduino's largest type is 32 bits and rowEnd consumes the last bit. | |||||
| The shift registers are active high: | The shift registers are active high: | ||||
| 10k pull-down resistors are grounded | 10k pull-down resistors are grounded | ||||
| private: | private: | ||||
| static const uint8_t SHIFT_LOAD; //controller's pin number that is connected to shift register's SHIFT_LOAD pin | static const uint8_t SHIFT_LOAD; //controller's pin number that is connected to shift register's SHIFT_LOAD pin | ||||
| const uint8_t STROBE_PIN; //Arduino pin number connected to this row | const uint8_t STROBE_PIN; //Arduino pin number connected to this row | ||||
| const read_pins_mask_t ROW_END; //bitwise, 1 bit marks positioned after last key of row | |||||
| const uint8_t BYTE_COUNT; //number of bytes to read from shift registers | const uint8_t BYTE_COUNT; //number of bytes to read from shift registers | ||||
| uint8_t KEY_COUNT; | |||||
| public: | public: | ||||
| RowScanner_SPIShiftRegisters(const uint8_t STROBE_PIN, uint8_t KEY_COUNT); | RowScanner_SPIShiftRegisters(const uint8_t STROBE_PIN, uint8_t KEY_COUNT); | ||||
| virtual read_pins_t scan(read_pins_mask_t& rowEnd); | |||||
| virtual read_pins_t scan(uint8_t& KEY_COUNT); | |||||
| void begin(); | void begin(); | ||||
| }; | }; | ||||
| #endif | #endif |
+ 3
- 3
src/Row_ShiftRegisters.cpp
查看文件
| { | { | ||||
| //these variables are all bitwise, one bit per key | //these variables are all bitwise, one bit per key | ||||
| read_pins_t rowState; //1 means pressed, 0 means released | read_pins_t rowState; //1 means pressed, 0 means released | ||||
| read_pins_mask_t rowEnd; //1 bit marks positioned after last key of row | |||||
| uint8_t keyCount; | |||||
| read_pins_t debouncedChanged; //1 means debounced changed | read_pins_t debouncedChanged; //1 means debounced changed | ||||
| rowState = scanner.scan(rowEnd); | |||||
| rowState = scanner.scan(keyCount); | |||||
| debouncedChanged = debouncer.debounce(rowState, debounced); | debouncedChanged = debouncer.debounce(rowState, debounced); | ||||
| pressRelease(rowEnd, debouncedChanged); | |||||
| pressRelease(keyCount, debouncedChanged); | |||||
| } | } | ||||
| void Row_ShiftRegisters::begin() | void Row_ShiftRegisters::begin() |
+ 13
- 3
src/Row_uC.cpp
查看文件
| { | { | ||||
| //these variables are all bitwise, one bit per key | //these variables are all bitwise, one bit per key | ||||
| read_pins_t rowState; //1 means pressed, 0 means released | read_pins_t rowState; //1 means pressed, 0 means released | ||||
| read_pins_mask_t rowEnd; //1 bit marks positioned after last key of row | |||||
| uint8_t keyCount; | |||||
| read_pins_t debouncedChanged; //1 means debounced changed | read_pins_t debouncedChanged; //1 means debounced changed | ||||
| rowState = scanner.scan(rowEnd); | |||||
| rowState = scanner.scan(keyCount); | |||||
| /* | |||||
| Keyboard.print(" keyCount="); | |||||
| Keyboard.print(keyCount); | |||||
| Keyboard.print(" rowState="); | |||||
| Keyboard.print(rowState); | |||||
| */ | |||||
| debouncedChanged = debouncer.debounce(rowState, debounced); | debouncedChanged = debouncer.debounce(rowState, debounced); | ||||
| pressRelease(rowEnd, debouncedChanged); | |||||
| /* | |||||
| Keyboard.print(" debounced="); | |||||
| Keyboard.print(debounced); | |||||
| */ | |||||
| pressRelease(keyCount, debouncedChanged); | |||||
| } | } |
+ 4
- 12
src/config_keybrd.h
查看文件
| #define CONFIG_KEYBRD_H | #define CONFIG_KEYBRD_H | ||||
| #include <inttypes.h> | #include <inttypes.h> | ||||
| /* size of read_pins_t and read_pins_mask_t depends on the maximum number of pins scanned by RowScanner. | |||||
| By default, read_pins_t and read_pins_mask_t are set to the largest type. | |||||
| /* size of read_pins_t depends on the maximum number of pins scanned by RowScanner. | |||||
| By default, read_pins_t is set to the largest type. | |||||
| If your 8-bit AVR is running low on memory, using a smaller type saves SRAM. | If your 8-bit AVR is running low on memory, using a smaller type saves SRAM. | ||||
| Using smaller types on a 32-bit uC (Teensy LC) would accomplish nothing. | Using smaller types on a 32-bit uC (Teensy LC) would accomplish nothing. | ||||
| */ | */ | ||||
| For RowScanner_SPIShiftRegisters, RowScanner_SPIShiftRegisters::KEY_COUNT | For RowScanner_SPIShiftRegisters, RowScanner_SPIShiftRegisters::KEY_COUNT | ||||
| For RowScanner_PinsBitwise, cover the last 1 bit in RowScanner_PinsBitwise::strobePin | For RowScanner_PinsBitwise, cover the last 1 bit in RowScanner_PinsBitwise::strobePin | ||||
| */ | */ | ||||
| typedef uint8_t read_pins_t; | |||||
| //typedef uint8_t read_pins_t; | |||||
| //typedef uint16_t read_pins_t; | //typedef uint16_t read_pins_t; | ||||
| //typedef uint32_t read_pins_t; | |||||
| /* read_pins_mask_t is only used for rowMask and rowEnd, which extends one bit beyond the last col pin. | |||||
| uncomment typedef that covers one bit beyond the last col pin. | |||||
| This could be the same typedef as read_pins_t, or the next larger typedef. | |||||
| */ | |||||
| typedef uint8_t read_pins_mask_t; | |||||
| //typedef uint16_t read_pins_mask_t; | |||||
| //typedef uint32_t read_pins_mask_t; | |||||
| typedef uint32_t read_pins_t; | |||||
| /* SAMPLE_COUNT = 4 is very reliable for a keyboard. | /* SAMPLE_COUNT = 4 is very reliable for a keyboard. | ||||
| Split keyboards with a long connecting wire or in environment with | Split keyboards with a long connecting wire or in environment with |
二进制
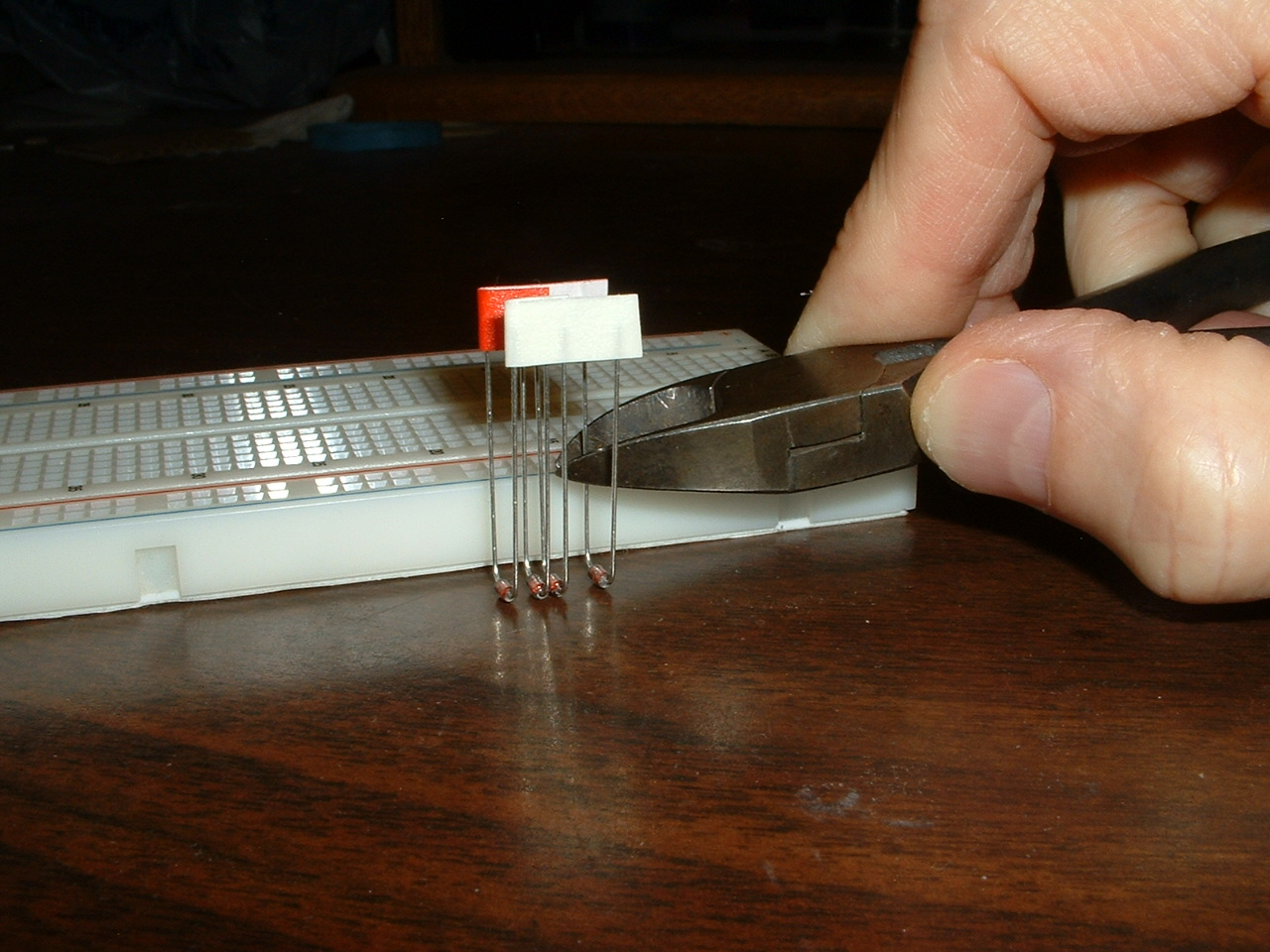
tutorials/images/bend_diodes_en_masse2.JPG
查看文件
{kind=link}

二进制
tutorials/images/bend_diodes_en_masse3.JPG
查看文件
{kind=link}
二进制
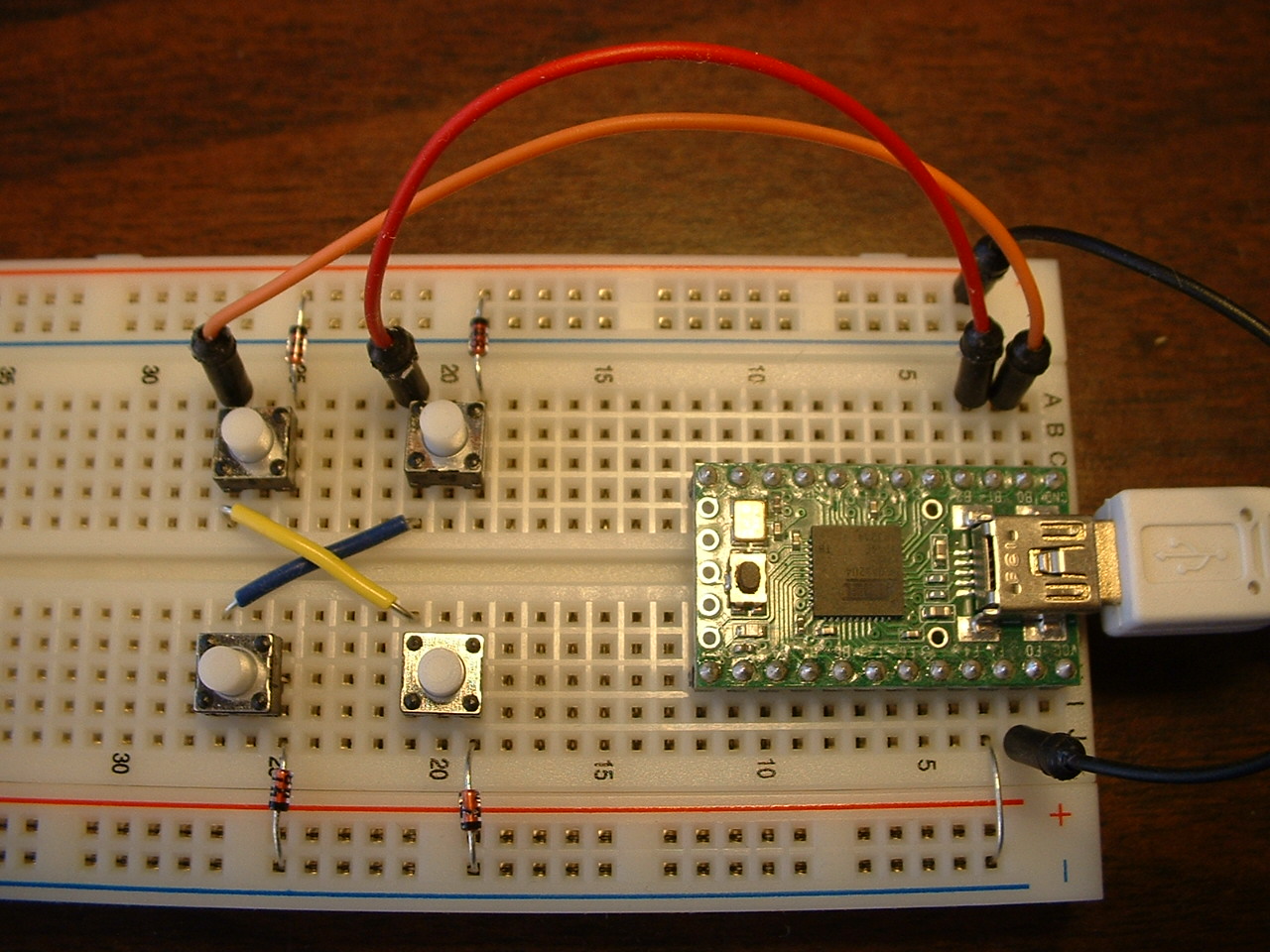
tutorials/images/breadboard_keyboard_2x2_crossColumns.jpg
查看文件
{kind=link}