
Kaynağa Gözat
move IOE_scan_development and unit_tests to examples, add examples/IOE_PCA9655E_development/
tags/v0.6.4 wolfv6
7 yıl önce
wolfv6
7 yıl önce
36 değiştirilmiş dosya ile 326 ekleme ve 358 silme
BIN
IOE_scan_development/IOE_scan_development.ods
Dosyayı Görüntüle
BIN
IOE_scan_development/openDrain_activeLow/back.JPG
Dosyayı Görüntüle
{kind=link}
BIN
IOE_scan_development/openDrain_activeLow/front.JPG
Dosyayı Görüntüle
{kind=link}
+ 0
- 69
IOE_scan_development/openDrain_activeLow/openDrain_activeLow.ino
Dosyayı Görüntüle
| @@ -1,69 +0,0 @@ | |||
| /* simulate one scan of a key martix, on open-drain active-low I/O expander | |||
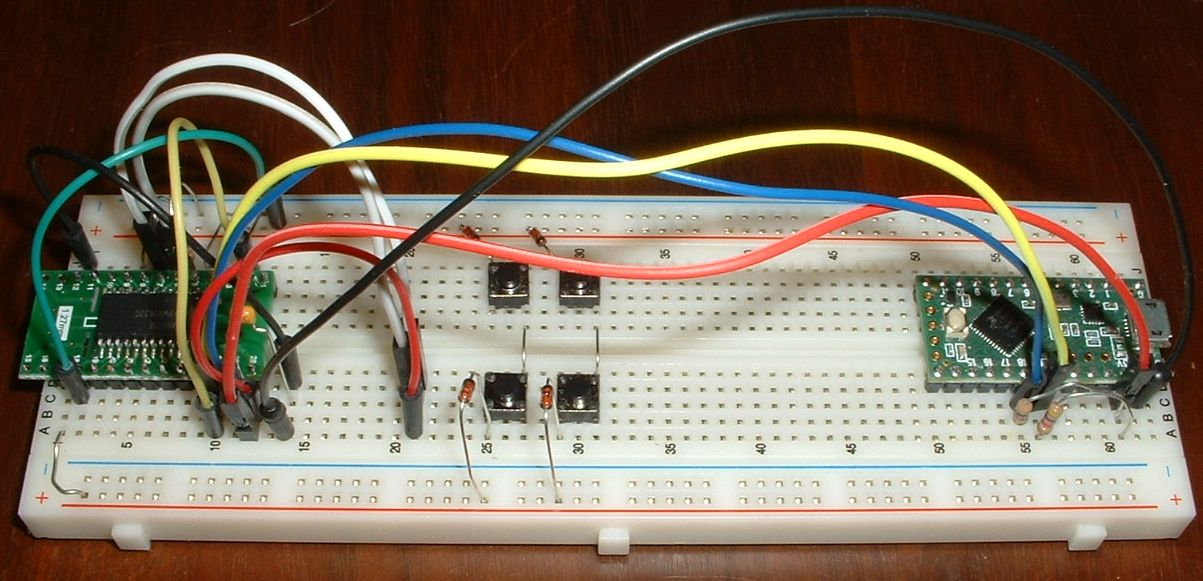
| BREADBOARD SETUP ******************************* | |||
| Teensy LC connected to MCP23018 I/O expander via I2C | |||
| 4.7k Ohm pullup resistors on SDA and SCL | |||
| use volt meter to measure pin voltages | |||
| MCP23018 has open-drain outputs (open-drain can only sink current) | |||
| MCP23018 PIN DIAGRAM *************************** | |||
| write port B read port A | |||
| GND VSS 1 28 NC | |||
| NC 2 27 GPA7 | |||
| jumper0 GPB0 3 26 GPA6 | |||
| GPB1 4 25 GPA5 | |||
| GPB2 5 24 GPA4 jumper4 | |||
| GPB3 6 23 GPA3 | |||
| jumper4 GPB4 7 22 GPA2 | |||
| GPB5 8 21 GPA1 | |||
| GPB6 9 20 GPA0 jumper0 | |||
| GPB7 10 19 INTA | |||
| power VDD 11 18 INTB | |||
| SCL SCL 12 17 NC | |||
| SDA SDA 13 16 RESET power | |||
| NC 14 15 ADDR GND | |||
| */ | |||
| #include "Wire.h" | |||
| const uint8_t ADDR = 0x20; //MCP23018 I2C address with ADDR pin grounded | |||
| void setup() | |||
| { | |||
| delay(1000); //time for Serial print to work | |||
| // ================= configure ================ | |||
| Serial.print("config "); | |||
| Wire.begin(); | |||
| Wire.beginTransmission(ADDR); | |||
| Wire.write(0x01); //IODIRB Configure | |||
| Wire.write(0); //as output | |||
| Wire.endTransmission(); | |||
| Wire.beginTransmission(ADDR); | |||
| Wire.write(0x00); //IODIRA Configuration | |||
| Wire.write(~0); //as input | |||
| Wire.endTransmission(); | |||
| Wire.beginTransmission(ADDR); | |||
| Wire.write(0x0C); //GPPUA pull-up | |||
| Wire.write(~0); //pull-up enabled | |||
| Wire.endTransmission(); | |||
| // =================== scan =================== | |||
| Serial.println("scan"); | |||
| Wire.beginTransmission(ADDR); | |||
| Wire.write(0x13); //GPIOB output | |||
| Wire.write(B00001111); //pins 0-3 off, pins 4-7 sink on (strobe, LED on) | |||
| Wire.endTransmission(); | |||
| Wire.beginTransmission(ADDR); | |||
| Wire.write(0x12); //GPIOA (immediately before requestFrom) | |||
| Wire.endTransmission(); | |||
| Wire.requestFrom(ADDR, static_cast<uint8_t>(1)); //request one byte from GPIOA read | |||
| Serial.print("portA="); | |||
| Serial.println(Wire.read(), BIN); //prints portA=11101111 | |||
| } | |||
| void loop() { } | |||
BIN
IOE_scan_development/source_activeHigh/DSCF0003.JPG
Dosyayı Görüntüle
{kind=link}
BIN
IOE_scan_development/source_activeHigh/DSCF0004.JPG
Dosyayı Görüntüle
{kind=link}
+ 0
- 69
IOE_scan_development/source_activeHigh/source_activeHigh.ino
Dosyayı Görüntüle
| @@ -1,69 +0,0 @@ | |||
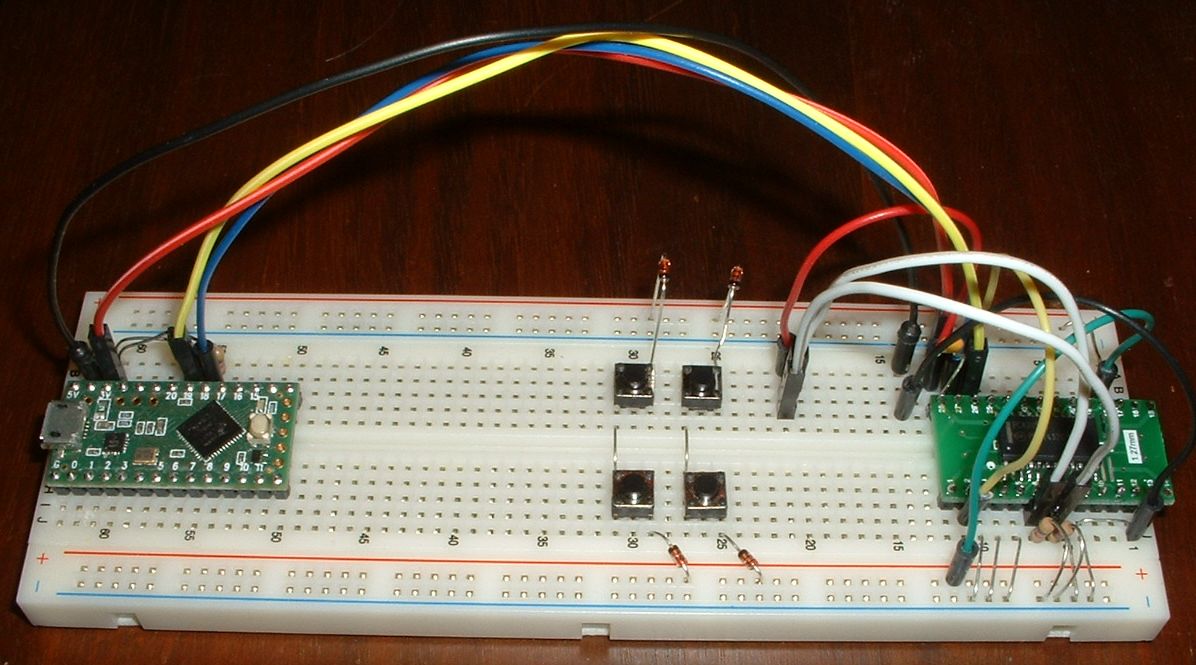
| /* simulate one scan of a key martix, on source active-high I/O expander | |||
| BREADBOARD SETUP ******************************* | |||
| Teensy LC connected to MCP23017 I/O expander via I2C | |||
| 10k Ohm external pulldown resistors on port A | |||
| 4.7k Ohm pullup resistors on SDA and SCL | |||
| use volt meter to measure pin voltages | |||
| MCP23017 PIN DIAGRAM *************************** | |||
| write port B read port A | |||
| jumper0 GPB0 1 26 GPA7 pulldown | |||
| GPB1 2 25 GPA6 pulldown | |||
| GPB2 3 24 GPA5 pulldown | |||
| GPB3 4 23 GPA4 pulldown jumper4 | |||
| jumper4 GPB4 5 22 GPA3 pulldown | |||
| GPB5 6 21 GPA2 pulldown | |||
| GPB6 7 20 GPA1 pulldown | |||
| GPB7 8 19 GPA0 pulldown jumper0 | |||
| power VDD 9 18 INTA | |||
| GND VSS 10 28 INTB | |||
| NC 11 27 RESET power | |||
| SCL SCL 12 17 A2 gnd | |||
| SDA SDA 13 16 A1 gnd | |||
| NC 14 15 A0 gnd | |||
| */ | |||
| #include "Wire.h" | |||
| const uint8_t ADDR = 0x20; //MCP23017 I2C address with all ADDR pins grounded | |||
| void setup() | |||
| { | |||
| delay(1000); //time for Serial print to work | |||
| // ================= configure ================ | |||
| Serial.print("config "); | |||
| Wire.begin(); | |||
| Wire.beginTransmission(ADDR); | |||
| Wire.write(0x01); //IODIRB Configure | |||
| Wire.write(0); //as output | |||
| Wire.endTransmission(); | |||
| Wire.beginTransmission(ADDR); | |||
| Wire.write(0x00); //IODIRA Configuration | |||
| Wire.write(~0); //as input | |||
| Wire.endTransmission(); | |||
| Wire.beginTransmission(ADDR); | |||
| Wire.write(0x0C); //GPPUA pull-up | |||
| Wire.write(0); //pull-up disabled | |||
| Wire.endTransmission(); | |||
| // =================== scan =================== | |||
| Serial.println("scan"); | |||
| Wire.beginTransmission(ADDR); | |||
| Wire.write(0x13); //GPIOB output | |||
| Wire.write(B11110000); //pins 0-3 ground, pins 4-7 power (strobe, LED on) | |||
| Wire.endTransmission(); | |||
| Wire.beginTransmission(ADDR); | |||
| Wire.write(0x12); //GPIOA (immediately before requestFrom) | |||
| Wire.endTransmission(); | |||
| Wire.requestFrom(ADDR, static_cast<uint8_t>(1)); //request one byte from GPIOA read | |||
| Serial.print("portA="); | |||
| Serial.println(Wire.read(), BIN); //prints portA=00010000 | |||
| } | |||
| void loop() { } | |||
BIN
IOE_scan_development/source_activeLow/back.JPG
Dosyayı Görüntüle
{kind=link}
BIN
IOE_scan_development/source_activeLow/front.JPG
Dosyayı Görüntüle
{kind=link}
+ 0
- 68
IOE_scan_development/source_activeLow/source_activeLow.ino
Dosyayı Görüntüle
| @@ -1,68 +0,0 @@ | |||
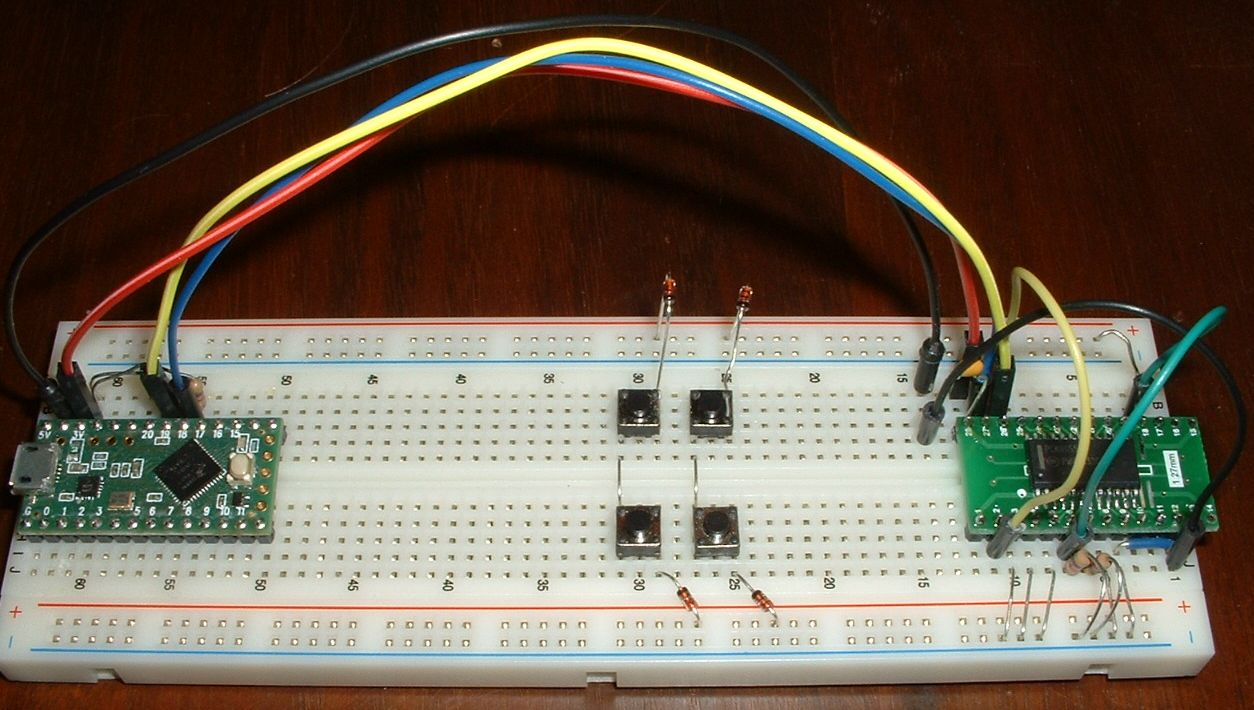
| /* simulate one scan of a key martix, on source active-low I/O expander | |||
| BREADBOARD SETUP ******************************* | |||
| Teensy LC connected to MCP23017 I/O expander via I2C | |||
| 4.7k Ohm pullup resistors on SDA and SCL | |||
| use volt meter to measure pin voltages | |||
| MCP23017 PIN DIAGRAM *************************** | |||
| write port B read port A | |||
| jumper0 GPB0 1 26 GPA7 | |||
| GPB1 2 25 GPA6 | |||
| GPB2 3 24 GPA5 | |||
| GPB3 4 23 GPA4 jumper4 | |||
| jumper4 GPB4 5 22 GPA3 | |||
| GPB5 6 21 GPA2 | |||
| GPB6 7 20 GPA1 | |||
| GPB7 8 19 GPA0 jumper0 | |||
| power VDD 9 18 INTA | |||
| GND VSS 10 28 INTB | |||
| NC 11 27 RESET power | |||
| SCL SCL 12 17 A2 gnd | |||
| SDA SDA 13 16 A1 gnd | |||
| NC 14 15 A0 gnd | |||
| */ | |||
| #include "Wire.h" | |||
| const uint8_t ADDR = 0x20; //MCP23017 I2C address with all ADDR pins grounded | |||
| void setup() | |||
| { | |||
| delay(1000); //time for Serial print to work | |||
| // ================= configure ================ | |||
| Serial.print("config "); | |||
| Wire.begin(); | |||
| Wire.beginTransmission(ADDR); | |||
| Wire.write(0x01); //IODIRB Configure | |||
| Wire.write(0); //as output | |||
| Wire.endTransmission(); | |||
| Wire.beginTransmission(ADDR); | |||
| Wire.write(0x00); //IODIRA Configuration | |||
| Wire.write(~0); //as input | |||
| Wire.endTransmission(); | |||
| Wire.beginTransmission(ADDR); | |||
| Wire.write(0x0C); //GPPUA pull-up | |||
| Wire.write(~0); //pull-up enabled | |||
| Wire.endTransmission(); | |||
| // =================== scan =================== | |||
| Serial.println("scan"); | |||
| Wire.beginTransmission(ADDR); | |||
| Wire.write(0x13); //GPIOB output | |||
| Wire.write(B00001111); //pins 0-3 power (strobe, LED on), pins 4-7 ground | |||
| Wire.endTransmission(); | |||
| Wire.beginTransmission(ADDR); | |||
| Wire.write(0x12); //GPIOA (immediately before requestFrom) | |||
| Wire.endTransmission(); | |||
| Wire.requestFrom(ADDR, static_cast<uint8_t>(1)); //request one byte from GPIOA read | |||
| Serial.print("portA="); | |||
| Serial.println(Wire.read(), BIN); //prints portA=11101111 | |||
| } | |||
| void loop() { } | |||
+ 58
- 0
examples/IOE_PCA9655E_development/PCA9655E_1_write_read/PCA9655E_1_write_read.ino
Dosyayı Görüntüle
| @@ -0,0 +1,58 @@ | |||
| /* PCA9655E_1_write_read.ino | |||
| set port 1 pins | |||
| read and print value of port 0 | |||
| measure port 1 pin voltages with a multimeter | |||
| DESTINATION PIN PIN_NUMBER PIN DESTINATION | |||
| x INT 1 24 VDD Teensy LC 3.3V | |||
| SCL AD1 2 23 SDA Teensy LC 18 | |||
| GND AD2 3 22 SCL Teensy LC 19 | |||
| GND IO0_0 4 21 AD0 SCL | |||
| GND IO0_1 5 20 IO1_6 x | |||
| VDD IO0_2 6 19 IO1_5 x | |||
| VDD IO0_3 7 18 IO1_4 x | |||
| GND IO0_4 8 17 IO1_4 x | |||
| GND IO0_5 9 16 IO1_3 x | |||
| x IO0_6 10 15 IO1_2 x | |||
| x IO0_7 11 14 IO1_1 x | |||
| GND VSS 12 13 IO1_0 x | |||
| */ | |||
| #include "Wire.h" | |||
| const uint8_t ADDR = 0x18; //I2C address with AD2=GND AD1=SCL AD0=SCL | |||
| void setup() | |||
| { | |||
| delay(1000); | |||
| Serial.print("PCA9655E_read.ino"); | |||
| Wire.begin(); | |||
| //Configure port 1 to output | |||
| Wire.beginTransmission(ADDR); | |||
| Wire.write(7); //configure direction | |||
| Wire.write(0); //0=output | |||
| Wire.endTransmission(); | |||
| Wire.beginTransmission(ADDR); | |||
| Wire.write(3); //command byte 3 = Output Port 1 | |||
| Wire.write( 1<<2 | 1<<3); //1=high | |||
| Wire.endTransmission(); | |||
| //Configure port 0 to input | |||
| Wire.beginTransmission(ADDR); | |||
| Wire.write(6); //command byte 6 = Configuration dir Port 0 | |||
| Wire.write(~0); //1=input | |||
| Wire.endTransmission(); | |||
| Wire.beginTransmission(ADDR); | |||
| Wire.write(0); //command byte 0 = Input Port 0 | |||
| Wire.endTransmission(false); //PCA9655E needs false to send a restart | |||
| Wire.requestFrom(ADDR, 1u); //request one byte from input port | |||
| Serial.print(" port0_val= "); | |||
| uint8_t port0_val = Wire.read(); | |||
| Serial.print(port0_val, BIN); //expect xx001100 | |||
| } | |||
| void loop() { } | |||
BIN
examples/IOE_PCA9655E_development/PCA9655E_1_write_read/back.JPG
Dosyayı Görüntüle
{kind=link}
BIN
examples/IOE_PCA9655E_development/PCA9655E_1_write_read/front.JPG
Dosyayı Görüntüle
{kind=link}
BIN
examples/IOE_PCA9655E_development/PCA9655E_2_scan/DSCF0001.JPG
Dosyayı Görüntüle
{kind=link}
BIN
examples/IOE_PCA9655E_development/PCA9655E_2_scan/DSCF0002.JPG
Dosyayı Görüntüle
{kind=link}
+ 56
- 0
examples/IOE_PCA9655E_development/PCA9655E_2_scan/PCA9655E_2_scan.ino
Dosyayı Görüntüle
| @@ -0,0 +1,56 @@ | |||
| /* PCA9655E_2_scan.ino | |||
| power IO0_2 and read IO1_1 (similar to strobe and read on key matrix) | |||
| DESTINATION PIN PIN_NUMBER PIN DESTINATION | |||
| x INT 1 24 VDD Teensy LC 3.3V | |||
| SCL AD1 2 23 SDA Teensy LC 18 | |||
| GND AD2 3 22 SCL Teensy LC 19 | |||
| GND IO0_0 4 21 AD0 SCL | |||
| GND IO0_1 5 20 IO1_6 x | |||
| IO1_1 IO0_2 6 19 IO1_5 x | |||
| GND IO0_3 7 18 IO1_4 x | |||
| GND IO0_4 8 17 IO1_4 x | |||
| GND IO0_5 9 16 IO1_3 x | |||
| x IO0_6 10 15 IO1_2 x | |||
| x IO0_7 11 14 IO1_1 IO0_2 | |||
| GND VSS 12 13 IO1_0 x | |||
| */ | |||
| #include "Wire.h" | |||
| const uint8_t ADDR = 0x18; //I2C address with AD2=GND AD1=SCL AD0=SCL | |||
| void setup() | |||
| { | |||
| delay(1000); | |||
| Serial.print("PCA9655E_read.ino"); | |||
| Wire.begin(); | |||
| //Configure port 1 to output | |||
| Wire.beginTransmission(ADDR); | |||
| Wire.write(7); //command byte 7 = Configuration dir Port 1 | |||
| Wire.write(0); //0=output | |||
| Wire.endTransmission(); | |||
| Wire.beginTransmission(ADDR); | |||
| Wire.write(3); //command byte 3 = Output Port 1 | |||
| Wire.write( 1<<1 ); //1=high | |||
| Wire.endTransmission(); | |||
| //Configure port 0 to input | |||
| Wire.beginTransmission(ADDR); | |||
| Wire.write(6); //command byte 6 = Configuration dir Port 0 | |||
| Wire.write(~0); //1=input | |||
| Wire.endTransmission(); | |||
| Wire.beginTransmission(ADDR); | |||
| Wire.write(0); //command byte 0 = Input Port 0 | |||
| Wire.endTransmission(false); //PCA9655E needs false to send a restart | |||
| Wire.requestFrom(ADDR, 1u); //request one byte from input port | |||
| Serial.print(" port0_val= "); | |||
| uint8_t port0_val = Wire.read(); | |||
| Serial.print(port0_val, BIN); //expect xx000100 | |||
| } | |||
| void loop() { } | |||
+ 45
- 0
examples/IOE_PCA9655E_development/PCA9655E_3_scan_lib/PCA9655E_3_scan_lib.ino
Dosyayı Görüntüle
| @@ -0,0 +1,45 @@ | |||
| /* PCA9655E_3_scan_lib.ino | |||
| does same as PCA9655E_2_scan.ino, but using keybrd library classes | |||
| pictures in PCA9655E_2_scan/ | |||
| set port 1 pins | |||
| read and print value of port 0 | |||
| measure port 1 pin voltages with a multimeter | |||
| DESTINATION PIN PIN_NUMBER PIN DESTINATION | |||
| x INT 1 24 VDD Teensy LC 3.3V | |||
| SCL AD1 2 23 SDA Teensy LC 18 | |||
| GND AD2 3 22 SCL Teensy LC 19 | |||
| GND IO0_0 4 21 AD0 SCL | |||
| GND IO0_1 5 20 IO1_6 x | |||
| IO1_1 IO0_2 6 19 IO1_5 x | |||
| GND IO0_3 7 18 IO1_4 x | |||
| GND IO0_4 8 17 IO1_4 x | |||
| GND IO0_5 9 16 IO1_3 x | |||
| x IO0_6 10 15 IO1_2 x | |||
| x IO0_7 11 14 IO1_1 IO0_2 strobe pin | |||
| GND VSS 12 13 IO1_0 x | |||
| */ | |||
| #include <Port_PCA9655E.h> | |||
| #include <Scanner_IOE.h> | |||
| const uint8_t ADDR = 0x18; //I2C address with AD2=GND AD1=SCL AD0=SCL | |||
| Port_PCA9655E port0(ADDR, 0, ~0); //read all pins | |||
| Port_PCA9655E port1(ADDR, 1, 0); //for strobe | |||
| Scanner_IOE scanner_R(HIGH, port1, port0); | |||
| void setup() | |||
| { | |||
| delay(6000); | |||
| Keyboard.print("PCA9655E_scan.ino"); | |||
| scanner_R.begin(); | |||
| Keyboard.print(" port0_val= "); | |||
| uint8_t port0_val = scanner_R.scan(1<<1); //strobe pin 1 | |||
| Keyboard.print(port0_val, BIN); //expect xx000100 | |||
| } | |||
| void loop() { } | |||
+ 86
- 0
examples/IOE_PCA9655E_development/PCA9655E_4_scan_loop/PCA9655E_4_scan_loop.ino
Dosyayı Görüntüle
| @@ -0,0 +1,86 @@ | |||
| /* PCA9655E_4_scan_loop.ino | |||
| does same as PCA9655E_2_scan.ino, but using keybrd library classes | |||
| pictures in PCA9655E_2_scan/ | |||
| set port 1 pins | |||
| read and print value of port 0 | |||
| measure port 1 pin voltages with a multimeter | |||
| DESTINATION PIN PIN_NUMBER PIN DESTINATION | |||
| x INT 1 24 VDD Teensy LC 3.3V | |||
| SCL AD1 2 23 SDA Teensy LC 18 | |||
| GND AD2 3 22 SCL Teensy LC 19 | |||
| GND IO0_0 4 21 AD0 SCL | |||
| GND IO0_1 5 20 IO1_6 x | |||
| IO1_1 IO0_2 6 19 IO1_5 x | |||
| GND IO0_3 7 18 IO1_4 x | |||
| GND IO0_4 8 17 IO1_4 x | |||
| GND IO0_5 9 16 IO1_3 x | |||
| x IO0_6 10 15 IO1_2 x | |||
| x IO0_7 11 14 IO1_1 IO0_2 strobe pin | |||
| GND VSS 12 13 IO1_0 x | |||
| */ | |||
| #include <Port_PCA9655E.h> | |||
| #include <Scanner_IOE.h> | |||
| const uint8_t ADDR = 0x18; //I2C address with AD2=GND AD1=SCL AD0=SCL | |||
| Port_PCA9655E port0(ADDR, 0, ~0); //read all pins | |||
| Port_PCA9655E port1(ADDR, 1, 0); //for strobe | |||
| Scanner_IOE scanner_R(HIGH, port1, port0); | |||
| void setup() | |||
| { | |||
| delay(6000); | |||
| Keyboard.println("PCA9655E_scan_loop.ino"); | |||
| scanner_R.begin(); | |||
| } | |||
| uint8_t port0_val; //bit pattern | |||
| uint8_t errorCount = 0; | |||
| int loopCount = 0; | |||
| int wait = 0; //delayMicroseconds | |||
| void status() | |||
| { | |||
| Keyboard.print(" loopCount="); | |||
| Keyboard.print(loopCount); | |||
| Keyboard.print(" wait="); | |||
| Keyboard.println(wait); | |||
| }; | |||
| void loop() | |||
| { | |||
| port0_val = scanner_R.scan(1<<1); //strobe pin 1 | |||
| if ( (B00111111 & port0_val) != B00000100 ) //expect xx000100, where xx float | |||
| { | |||
| Keyboard.print("port0_val="); | |||
| Keyboard.print(port0_val, BIN); | |||
| errorCount++; | |||
| status(); | |||
| } | |||
| loopCount++; | |||
| if (loopCount > 32000 || errorCount > 10) | |||
| { | |||
| Keyboard.print("stop errorCount="); | |||
| Keyboard.print(errorCount); | |||
| status(); | |||
| while(1); | |||
| } | |||
| if (loopCount % 1000 == 0) | |||
| { | |||
| Keyboard.print(" progress"); | |||
| status(); | |||
| } | |||
| if (loopCount > 22000) | |||
| { | |||
| wait++; //test other delays | |||
| } | |||
| delayMicroseconds(wait); | |||
| } | |||
BIN
examples/IOE_PCA9655E_development/PCA9655E_5_keybrd/back.JPG
Dosyayı Görüntüle
{kind=link}
BIN
examples/IOE_PCA9655E_development/PCA9655E_5_keybrd/front.JPG
Dosyayı Görüntüle
{kind=link}
examples/keybrd_PCA9655E/keybrd_PCA9655E.ino → examples/IOE_PCA9655E_development/PCA9655E_5_keybrd/keybrd_PCA9655E.ino
Dosyayı Görüntüle
| @@ -1,10 +1,26 @@ | |||
| /* keybrd_PCA9655E.ino | |||
| keyboard layout is same as top-left keys of DH matrices: | |||
| Controller I/O expander | |||
| | Left | **0** | **1** | | Right | **0** | **1** | | |||
| | Left | **0** | **1** | | Right | **2** | **3** | | |||
| |:-----:|-------|-------| |:-----:|-------|-------| | |||
| | **1** | 1 | 2 | | **1** | 3 | 4 | | |||
| | **0** | a | b | | **0** | c | d | | |||
| | **1** | q | w | | **1** | u | i | | |||
| | **0** | [ | b | | **0** | h | y | | |||
| PCA9655E pin assignments are compatible with this sketch and keybrd_DH.ino | |||
| DESTINATION PIN PIN_NUMBER PIN DESTINATION | |||
| x INT 1 24 VDD Teensy LC 3.3V | |||
| SCL AD1 2 23 SDA Teensy LC 18 | |||
| GND AD2 3 22 SCL Teensy LC 19 | |||
| GND IO0_0 4 21 AD0 SCL | |||
| GND IO0_1 5 20 IO1_6 x | |||
| col2 IO0_2 6 19 IO1_5 x | |||
| col3 IO0_3 7 18 IO1_4 x | |||
| GND IO0_4 8 17 IO1_4 x | |||
| GND IO0_5 9 16 IO1_3 x | |||
| x IO0_6 10 15 IO1_2 x | |||
| x IO0_7 11 14 IO1_1 row1 | |||
| GND VSS 12 13 IO1_0 row2 | |||
| */ | |||
| // ################## GLOBAL ################### | |||
| // ================= INCLUDES ================== | |||
| @@ -29,55 +45,62 @@ uint8_t readPinCount = sizeof(readPins)/sizeof(*readPins); | |||
| Scanner_uC scanner_L(HIGH, readPins, readPinCount); | |||
| // =============== RIGHT SCANNER =============== | |||
| const uint8_t IOE_ADDR = 0x18; | |||
| const uint8_t IOE_ADDR = 0x18; //AD2=GND AD1=SCL AD0=SCL | |||
| Port_PCA9655E port1(IOE_ADDR, 1, 0); //for strobe | |||
| Port_PCA9655E port0(IOE_ADDR, 0, 1<<0 | 1<<1 ); //for read | |||
| Port_PCA9655E port0(IOE_ADDR, 0, 1<<0 | 1<<1 | 1<<2 | 1<<3 | 1<<4 | 1<<5 ); //for read | |||
| Port_PCA9655E port1(IOE_ADDR, 1, 0); //for strobe | |||
| Scanner_IOE scanner_R(HIGH, port1, port0); | |||
| // =================== CODES =================== | |||
| Code_Sc s_a(KEY_A); | |||
| Code_Sc s_b(KEY_B); | |||
| Code_Sc s_c(KEY_C); | |||
| Code_Sc s_d(KEY_D); | |||
| Code_Sc s_B(KEY_B); | |||
| Code_Sc s_I(KEY_I); | |||
| Code_Sc s_H(KEY_H); | |||
| Code_Sc s_Q(KEY_Q); | |||
| Code_Sc s_W(KEY_W); | |||
| Code_Sc s_U(KEY_U); | |||
| Code_Sc s_Y(KEY_Y); | |||
| Code_Sc s_0(KEY_0); | |||
| Code_Sc s_1(KEY_1); | |||
| Code_Sc s_2(KEY_2); | |||
| Code_Sc s_3(KEY_3); | |||
| Code_Sc s_4(KEY_4); | |||
| Code_Sc s_leftBracket(KEY_LEFT_BRACE); | |||
| // =================== ROWS ==================== | |||
| // ---------------- LEFT ROWS ------------------ | |||
| Key* ptrsKeys_L0[] = { &s_1, &s_2 }; | |||
| Key* ptrsKeys_L0[] = { &s_Q, &s_W }; | |||
| uint8_t KEY_COUNT_L0 = sizeof(ptrsKeys_L0)/sizeof(*ptrsKeys_L0); | |||
| Row row_L0(scanner_L, 21, ptrsKeys_L0, KEY_COUNT_L0); | |||
| Key* ptrsKeys_L1[] = { &s_a, &s_b }; | |||
| Key* ptrsKeys_L1[] = { &s_leftBracket, &s_B }; | |||
| uint8_t KEY_COUNT_L1 = sizeof(ptrsKeys_L1)/sizeof(*ptrsKeys_L1); | |||
| Row row_L1(scanner_L, 20, ptrsKeys_L1, KEY_COUNT_L1); | |||
| // ---------------- RIGHT ROWS ----------------- | |||
| Key* ptrsKeys_R0[] = { &s_3, &s_4 }; | |||
| Key* ptrsKeys_R0[] = { &s_0, &s_1, &s_U, &s_I }; | |||
| uint8_t KEY_COUNT_R0 = sizeof(ptrsKeys_R0)/sizeof(*ptrsKeys_R0); | |||
| Row row_R0(scanner_R, 1<<0, ptrsKeys_R0, KEY_COUNT_R0); | |||
| Key* ptrsKeys_R1[] = { &s_c, &s_d }; | |||
| Key* ptrsKeys_R1[] = { &s_0, &s_1, &s_H, &s_Y }; | |||
| uint8_t KEY_COUNT_R1 = sizeof(ptrsKeys_R1)/sizeof(*ptrsKeys_R1); | |||
| Row row_R1(scanner_R, 1<<1, ptrsKeys_R1, KEY_COUNT_R1); | |||
| /* | |||
| */ | |||
| // ################### MAIN #################### | |||
| void setup() | |||
| { | |||
| Keyboard.begin(); | |||
| delay(6000); | |||
| Keyboard.print("keybrd_PCA9655E.ino "); | |||
| //Keyboard.begin(); not needed ?? it's in DH mainSketch.cpp and keybrd_4c_split_keyboard_with_IOE.ino | |||
| scanner_R.begin(); | |||
| } | |||
| void loop() | |||
| { | |||
| //left matrix | |||
| row_L0.process(); | |||
| row_L1.process(); | |||
| //left matrix (commented because keys are not connected) | |||
| //row_L0.process(); | |||
| //row_L1.process(); | |||
| //right matrix | |||
| row_R0.process(); | |||
+ 8
- 0
examples/IOE_PCA9655E_development/README.md
Dosyayı Görüntüle
| @@ -0,0 +1,8 @@ | |||
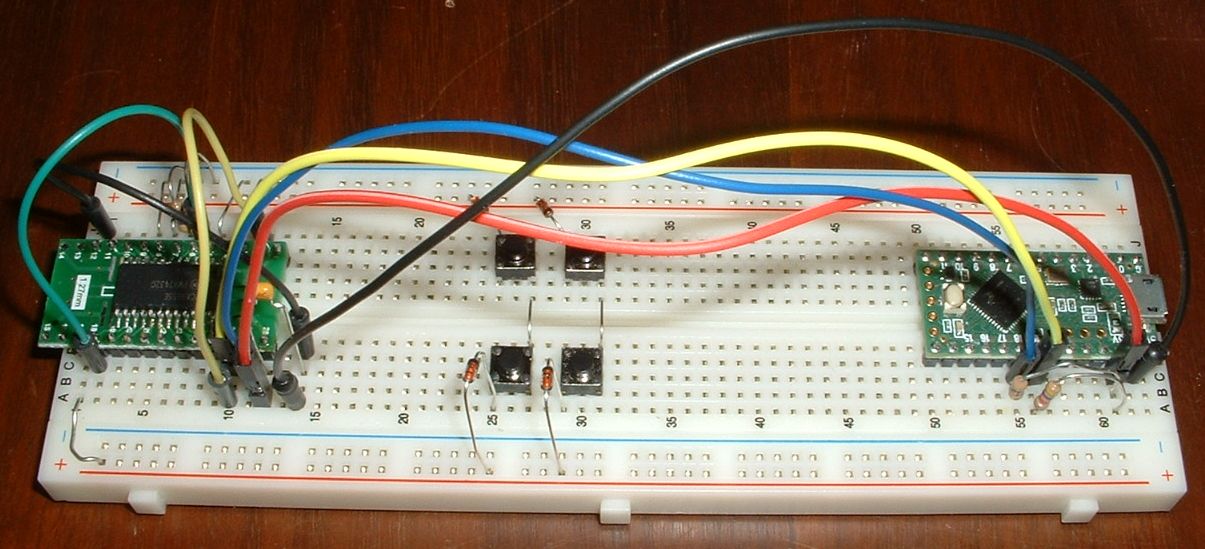
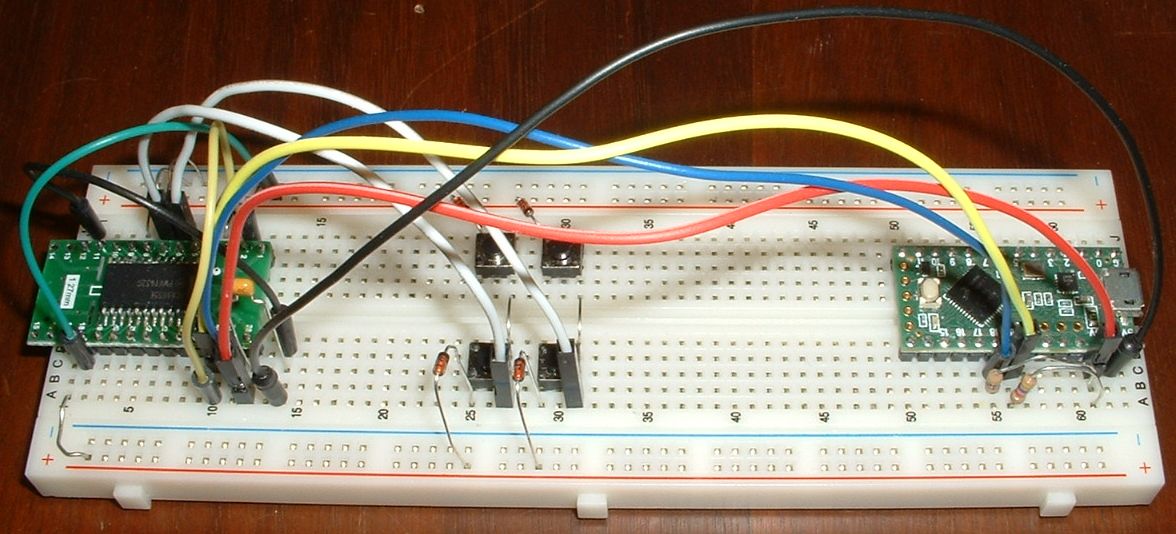
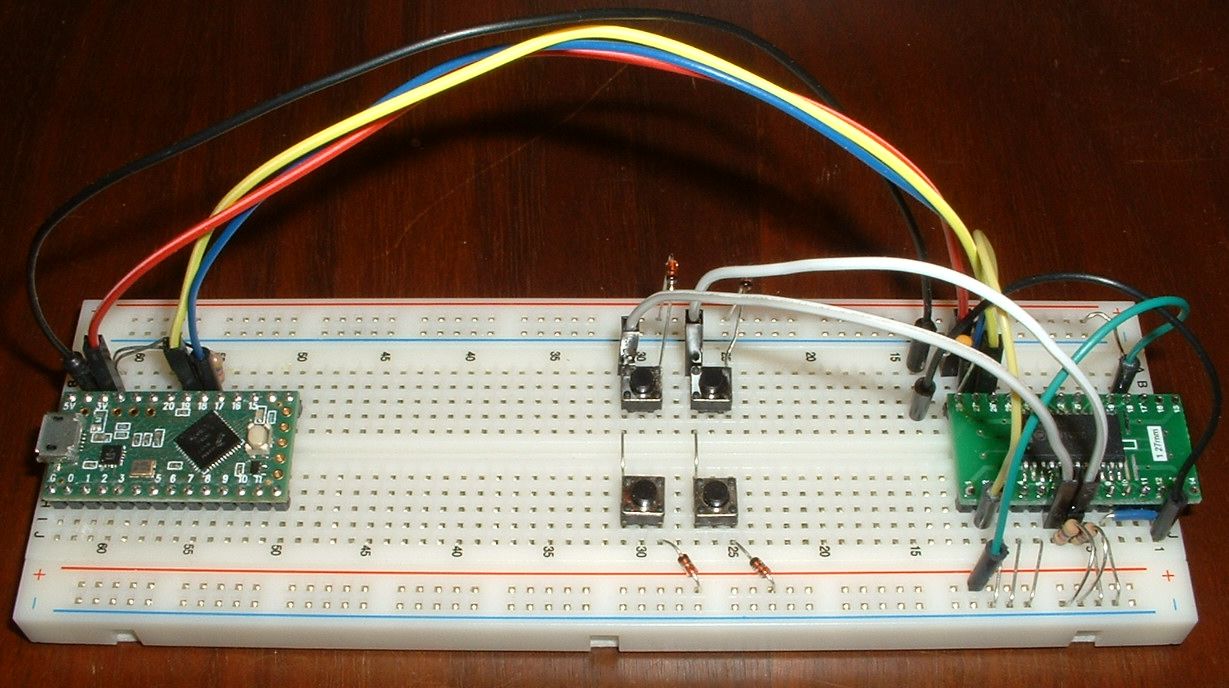
| The series of sketches in this folder where used to develope the Port_PCA9655E class. | |||
| The folder numbers are ordered from fundamental to practical. | |||
| Each sketch was tested on a breadboard. Breadboards hold: | |||
| * Teensy LC controller | |||
| * PCA9655E I/O expander | |||
| Pictures of the breadboard are in the folders. | |||
+ 1
- 6
examples/keybrd_MCP23018/keybrd_MCP23018.ino
Dosyayı Görüntüle
| @@ -71,7 +71,7 @@ Code_Sc s_2(KEY_2); | |||
| Code_Sc s_3(KEY_3); | |||
| Code_Sc s_4(KEY_4); | |||
| Code_LEDLock o_capsLock(KEY_CAPS_LOCK, LED_capsLck);//todo was testing LED, restore s_4 when done | |||
| Code_LEDLock o_capsLock(KEY_CAPS_LOCK, LED_capsLck);//was testing LED, restore s_4 when done | |||
| /* =================== ROWS ==================== | |||
| Left row names contain the letter 'L', while right row names conatain the letter 'R'. | |||
| @@ -118,14 +118,9 @@ void loop() | |||
| //right matrix | |||
| row_R0.process(); | |||
| //Keyboard.println(" 0"); | |||
| //delay(2000); | |||
| row_R1.process(); | |||
| //Keyboard.println(" 1"); | |||
| //delay(2000); | |||
| scanDelay.delay(); | |||
| //Keyboard.println(" end loop");//todo | |||
| //debug.print_scans_per_second(); | |||
| //debug.print_microseconds_per_scan(); | |||
| } | |||
+ 5
- 0
src/LED_uC.cpp
Dosyayı Görüntüle
| @@ -1,5 +1,10 @@ | |||
| #include "LED_uC.h" | |||
| LED_uC::LED_uC(const uint8_t pin) : pin(pin) | |||
| { | |||
| pinMode(pin, OUTPUT); | |||
| } | |||
| void LED_uC::on() | |||
| { | |||
| digitalWrite(pin, HIGH); | |||
+ 2
- 6
src/LED_uC.h
Dosyayı Görüntüle
| @@ -9,13 +9,9 @@ | |||
| class LED_uC: public LEDInterface | |||
| { | |||
| private: | |||
| const uint8_t pin; //Aduino pin that is connected to an LED | |||
| const uint8_t pin; //Aduino pin number connected to an LED | |||
| public: | |||
| LED_uC(const uint8_t pin): pin(pin) | |||
| { | |||
| pinMode(pin, OUTPUT);//todo move to .cpp file | |||
| } | |||
| LED_uC(const uint8_t pin); | |||
| virtual void on(); | |||
| virtual void off(); | |||
| }; | |||
+ 0
- 7
src/Port_MCP23018.cpp
Dosyayı Görüntüle
| @@ -1,5 +1,4 @@ | |||
| #include "Port_MCP23018.h" | |||
| //todo add Port_MCP23018::write() like Port_MCP23S17::transer() ?? | |||
| /* beginProtocol() is called from Scanner_IOE::begin(). Initiates I2C bus. | |||
| @@ -11,7 +10,6 @@ Longer wires require lower clock speeds. | |||
| void Port_MCP23018::beginProtocol() | |||
| { | |||
| Wire.begin(); //initiate I2C bus to 100 kHz | |||
| //Wire.setClock(400000L); //set I2C bus to 400 kHz (have not tested 400 kHz) | |||
| } | |||
| /* begin() is called from Scanner_IOE::begin(). | |||
| @@ -51,21 +49,16 @@ void Port_MCP23018::write(const uint8_t pin, const bool logicLevel) | |||
| if (logicLevel == LOW) | |||
| { | |||
| outputVal &= ~pin; //set pin output to low | |||
| //Keyboard.print(" low"); | |||
| } | |||
| else | |||
| { | |||
| outputVal |= pin; //set pin output to high | |||
| //Keyboard.print(" high"); | |||
| } | |||
| //Keyboard.print(" outputVal=");//todo | |||
| //Keyboard.println(outputVal); | |||
| Wire.beginTransmission(deviceAddr); | |||
| Wire.write(portNum + 0x12); //GPIO | |||
| Wire.write(outputVal); | |||
| Wire.endTransmission(); | |||
| //delay(4000); | |||
| } | |||
| /* read() returns portState. | |||
+ 2
- 2
src/Port_PCA9655E.cpp
Dosyayı Görüntüle
| @@ -15,12 +15,12 @@ void Port_PCA9655E::beginProtocol() | |||
| /* begin() is called from Scanner_IOE::begin(). | |||
| Configures read pins to input. | |||
| strobeOn is not used because PCA9655E has no pull-up resistors. | |||
| strobeOn is not used because PCA9655E has no internal pull-up resistors. | |||
| */ | |||
| void Port_PCA9655E::begin(const uint8_t strobeOn) | |||
| { | |||
| Wire.beginTransmission(deviceAddr); | |||
| Wire.write(portNum + 6); //configuration byte command | |||
| Wire.write(portNum + 6); //configure direction | |||
| Wire.write(readPins); //0=output (for strobe and LED), 1=input (for read) | |||
| Wire.endTransmission(); | |||
| } | |||
+ 3
- 5
src/Row.h
Dosyayı Görüntüle
| @@ -11,12 +11,10 @@ | |||
| /* | |||
| strobePin has one of two formats: | |||
| 1. if strobe pin is on uC (Scanner_uC or Scanner_ShiftRegsRead), | |||
| * if strobe pin is on uC (strobe for Scanner_uC or Scanner_ShiftRegsRead), | |||
| then strobePin is an Arduino pin number connected to this row. | |||
| 2. if strobe pin is on I/O expander (Scanner_IOE), then strobePin is bit pattern, | |||
| * if strobe pin is on I/O expander (strobe for Scanner_IOE), then strobePin is bit pattern, | |||
| 1 indicating the I/O expander pin connected to this row | |||
| todo instantiation examples - here or in Scanner? | |||
| */ | |||
| class Row | |||
| { | |||
| @@ -31,7 +29,7 @@ class Row | |||
| protected: | |||
| const uint8_t keyCount; //number of read pins | |||
| //Debouncer_Samples debouncer; | |||
| Debouncer_Not debouncer; //todo | |||
| Debouncer_Not debouncer; //todo restore Debouncer_Samples after testing | |||
| read_pins_t debounced; //bit pattern, state of keys after debouncing, 1=pressed, 0=released | |||
| public: | |||
| Row(ScannerInterface& refScanner, const uint8_t strobePin, | |||
+ 7
- 10
src/Scanner_ShiftRegsReadStrobed.cpp
Dosyayı Görüntüle
| @@ -6,25 +6,20 @@ Scanner_ShiftRegsReadStrobed::Scanner_ShiftRegsReadStrobed(const bool activeStat | |||
| slaveSelect(slaveSelect), byte_count(byte_count) | |||
| { | |||
| pinMode(slaveSelect, OUTPUT); | |||
| SPI.begin(); | |||
| } | |||
| /* init() is called once for each row from Row constructor. | |||
| Configures controller to communicate with shift register matrix. | |||
| slaveSelect initialize not needed, only affects first scan, which is before USB is detected by OS. | |||
| digitalWrite(slaveSelect, HIGH); | |||
| */ | |||
| void Scanner_ShiftRegsReadStrobed::init(const uint8_t strobePin) | |||
| { | |||
| pinMode(strobePin, OUTPUT); | |||
| } | |||
| /* begin() should be called once from sketch setup(). | |||
| Initializes shift register's shift/load pin. | |||
| */ | |||
| void Scanner_ShiftRegsReadStrobed::begin() | |||
| { | |||
| digitalWrite(slaveSelect, HIGH); //initialize ??only needed for first scan | |||
| SPI.begin(); //todo move this to constructor or init() | |||
| } | |||
| /* scan() strobes the row's strobePin and returns state of the shift register's input pins. | |||
| strobePin is Arduino pin number connected to this row. | |||
| Bit patterns are 1 bit per key. | |||
| @@ -44,6 +39,7 @@ read_pins_t Scanner_ShiftRegsReadStrobed::scan(const uint8_t strobePin) | |||
| { | |||
| read_pins_t readState = 0; //bits, 1 means key is pressed, 0 means released | |||
| //strobe off here NOT release continuously | |||
| digitalWrite(strobePin, activeState); //strobe on | |||
| //SPI.beginTransaction( SPISettings(5000000, MSBFIRST, SPI_MODE0) ); //control SPI bus, 5 MHz | |||
| @@ -53,7 +49,7 @@ read_pins_t Scanner_ShiftRegsReadStrobed::scan(const uint8_t strobePin) | |||
| digitalWrite(slaveSelect, HIGH); //shift the data toward a serial output | |||
| digitalWrite(strobePin, !activeState); //strobe off to preserv IR LED life | |||
| digitalWrite(strobePin, !activeState); //strobe off to preserve IR LED life | |||
| SPI.transfer(&readState, byte_count); | |||
| @@ -61,6 +57,7 @@ read_pins_t Scanner_ShiftRegsReadStrobed::scan(const uint8_t strobePin) | |||
| digitalWrite(slaveSelect, LOW); //load parallel inputs to registers | |||
| //strobe off here still releases continuously | |||
| return readState; | |||
| } | |||
+ 0
- 1
src/Scanner_ShiftRegsReadStrobed.h
Dosyayı Görüntüle
| @@ -55,7 +55,6 @@ class Scanner_ShiftRegsReadStrobed : public ScannerInterface | |||
| Scanner_ShiftRegsReadStrobed(const bool activeState, | |||
| const uint8_t slaveSelect, const uint8_t byte_count); | |||
| virtual void init(const uint8_t strobePin); | |||
| virtual void begin(); | |||
| virtual read_pins_t scan(const uint8_t strobePin); | |||
| }; | |||
| #endif | |||
+ 6
- 4
tutorials/keybrd_4c_split_keyboard_with_IOE/keybrd_4c_split_keyboard_with_IOE.ino
Dosyayı Görüntüle
| @@ -49,8 +49,8 @@ In portA, the first two pins are set to input for reading. | |||
| "<<" (bit shift left) and "|" (OR) are bitwise operators. | |||
| Pin numbers to be read are to the right of "1<<" and delimited by "|". | |||
| */ | |||
| Port_MCP23S17 portA(IOE_ADDR, 0, 1<<0 | 1<<1 ); | |||
| Port_MCP23S17 portB(IOE_ADDR, 1, 0); | |||
| Port_MCP23S17 portA(IOE_ADDR, 0, 1<<0 | 1<<1 ); //for read | |||
| Port_MCP23S17 portB(IOE_ADDR, 1, 0); //for strobe | |||
| Scanner_IOE scanner_R(LOW, portB, portA); | |||
| // =================== CODES =================== | |||
| @@ -69,8 +69,10 @@ Left row names contain the letter 'L', while right row names conatain the letter | |||
| Row constructor parameters are: scanner, strobePin, ptrsKeys[], keyCount. | |||
| strobePin has one of two formats: | |||
| * if refScanner a Scanner_uC, then strobePin is an Arduino pin number connected to this row | |||
| * otherwise strobePin is a bit pattern, 1 indicating an IC pin connected to the row | |||
| * if strobe pin is on uC (strobe for Scanner_uC or Scanner_ShiftRegsRead), | |||
| then strobePin is an Arduino pin number connected to this row. | |||
| * if strobe pin is on I/O expander (strobe for Scanner_IOE), then strobePin is bit pattern, | |||
| 1 indicating the I/O expander pin connected to this row | |||
| */ | |||
| /* ---------------- LEFT ROWS ------------------ | |||
| The left rows have a Scanner_uC and Arduino pin numbers to strobe. | |||
+ 2
- 2
tutorials/tutorial_10_writing_IOE_port_classes.md
Dosyayı Görüntüle
| @@ -19,8 +19,8 @@ Steps to writing a new port class: | |||
| 5. Study other keybrd port classes. | |||
| * SPI I/O expander port classes: Port_MCP23S17 | |||
| * I2C I/O expander port classes: Port_PCA9655E | |||
| 6. Write the port classes for your I/O expander. | |||
| Debugging I/O expander code is hard because SPI or I2C protocol adds a level of indirection. | |||
| 6. Write the port classes for your I/O expander. Debugging I/O expander code is hard because | |||
| SPI or I2C protocol, expander configuration, and expander commands. | |||
| <br> | |||
| <a rel="license" href="https://creativecommons.org/licenses/by/4.0/"><img alt="Creative Commons License" style="border-width:0" src="https://licensebuttons.net/l/by/4.0/88x31.png" /></a><br /><span xmlns:dct="http://purl.org/dc/terms/" property="dct:title">keybrd tutorial</span> by <a xmlns:cc="https://creativecommons.org/ns" href="https://github.com/wolfv6/keybrd" property="cc:attributionName" rel="cc:attributionURL">Wolfram Volpi</a> is licensed under a <a rel="license" href="https://creativecommons.org/licenses/by/4.0/">Creative Commons Attribution 4.0 International License</a>.<br />Permissions beyond the scope of this license may be available at <a xmlns:cc="https://creativecommons.org/ns" href="https://github.com/wolfv6/keybrd/issues/new" rel="cc:morePermissions">https://github.com/wolfv6/keybrd/issues/new</a>. | |||
+ 0
- 33
unit_tests/PortMCP23018_write/PortMCP23018_write.ino
Dosyayı Görüntüle
| @@ -1,33 +0,0 @@ | |||
| /* unit test for Port_MCP23018 | |||
| Picture of hardware is in unit_tests/PortMCP23018_read/PortMCP23018_bb.JPG todo | |||
| The setup is an MCP23018 I/O expander on a Teensy LC controller. | |||
| MCP23018 port-A GPIO pins are not connected to anything. | |||
| Port-A GPIO-pin ouputs alternate between 0 and 3.3 volts. | |||
| volt meter between pin A1 and power because | |||
| MCP23018 has open-drain outputs (open-drain can only sink current) | |||
| Use a volt meter to measure port-A GPIO-pin outputs or red LED. | |||
| */ | |||
| #include "Port_MCP23018.h" | |||
| const uint8_t IOE_ADDR = 0x20; //MCP23018 address ADDR pin grounded | |||
| Port_MCP23018 portA(IOE_ADDR, 0, 0); | |||
| void setup() | |||
| { | |||
| delay(6000); | |||
| Keyboard.println("PortMCP23018_write.ino"); | |||
| portA.beginProtocol(); | |||
| portA.begin(LOW); //HIGH or LOW, not matter if readPins=0 | |||
| } | |||
| void loop() | |||
| { | |||
| portA.write(~0, HIGH); //set all GPIOA pins HIGH | |||
| Keyboard.print("+"); | |||
| delay(2000); | |||
| portA.write(~0, LOW); //set all GPIOA pins LOW | |||
| Keyboard.print("0"); | |||
| delay(2000); | |||
| } | |||
BIN
unit_tests/PortMCP23S17_read/PortMCP23S17_bb.JPG
Dosyayı Görüntüle
{kind=link}
+ 0
- 25
unit_tests/PortMCP23S17_read/PortMCP23S17_read.ino
Dosyayı Görüntüle
| @@ -1,25 +0,0 @@ | |||
| /* unit test for PortMCP23S17 | |||
| Picture of hardware is in unit_tests/PortMCP23S17_read/PortMCP23S17_bb.JPG | |||
| The setup is an MCP23S17 I/O expander on a Teensy LC controller. | |||
| MCP23S17 port-B pins are alternately grounded and energized. | |||
| output is: 10101010 | |||
| */ | |||
| #include "Port_MCP23S17.h" | |||
| const uint8_t IOE_ADDR = 0x20; //MCP23S17 address, all 3 ADDR pins grounded | |||
| Port_MCP23S17 portB(IOE_ADDR, 1, ~0); //read all pins | |||
| void setup() | |||
| { | |||
| uint8_t BitPattern; //reading of port B | |||
| delay(6000); | |||
| portB.begin(HIGH); //HIGH or LOW, does not matter | |||
| BitPattern = portB.read(); | |||
| Keyboard.print("BitPattern = "); | |||
| Keyboard.println(BitPattern, BIN); //prints 10101010 | |||
| } | |||
| void loop() { } | |||
+ 0
- 29
unit_tests/PortMCP23S17_write/PortMCP23S17_write.ino
Dosyayı Görüntüle
| @@ -1,29 +0,0 @@ | |||
| /* unit test for Port_MCP23S17 | |||
| Picture of hardware is in unit_tests/PortMCP23S17_read/PortMCP23S17_bb.JPG | |||
| The setup is an MCP23S17 I/O expander on a Teensy LC controller. | |||
| MCP23S17 port-A GPIO pins are not connected to anything. | |||
| Port-A GPIO-pin ouputs alternate between 0 and 3.3 volts. | |||
| Use a volt meter to measure port-A GPIO-pin outputs or red LED. | |||
| */ | |||
| #include "Port_MCP23S17.h" | |||
| const uint8_t IOE_ADDR = 0x20; //MCP23S17 address, all 3 ADDR pins grounded | |||
| Port_MCP23S17 portA(IOE_ADDR , 0, 0); //PortAWrite needed for begin() | |||
| void setup() | |||
| { | |||
| delay(6000); | |||
| Keyboard.println("start setup"); | |||
| portA.begin(LOW); //HIGH or LOW, not matter if readPins=0 | |||
| Keyboard.println("start loop"); | |||
| } | |||
| void loop() | |||
| { | |||
| portA.write(~0, HIGH); //set all GPIOA pins HIGH | |||
| delay(2000); | |||
| portA.write(~0, LOW); //set all GPIOA pins LOW | |||
| delay(2000); | |||
| } | |||